
Figure 8.
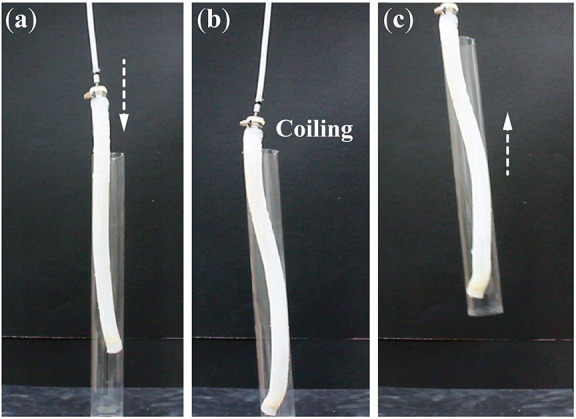
A demonstration of a robotic application of lifting a pipe via coiling from inside. (a) The unpressurized actuator is first placed inside a hollow plastic pipe. (b) Then, it coils under pressure (21 kPa) and creates contact on the inner pipe surface. (c) The pipe is lift up with the help of friction force. The coiling actuator here has a title angle α = 41°.