
Figure 3.
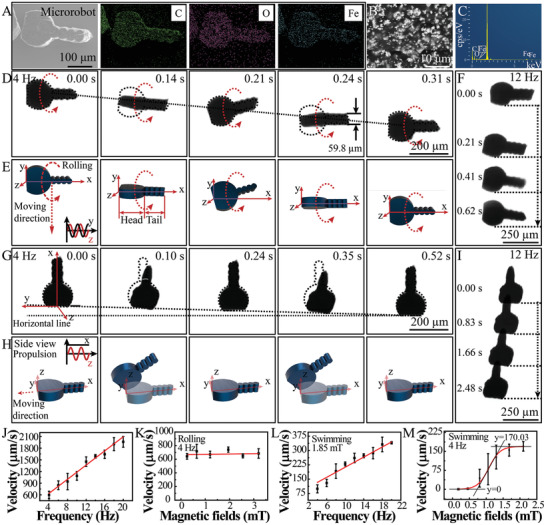
Characterization and controllable movement of the tadpole‐like magnetic microrobot. (A) Scanning electron microscopy (SEM) image of tadpole‐like polycaprolactone (PCL)/Fe3O4 magnetic microrobot with element mapping of C, O, and Fe. The enlarged SEM image (B) and EDX spectra (C) of the tadpole‐like PCL/Fe3O4 microrobot. The optical microscope images and 3D schematics of microrobot motion under the rolling (D,E) and propulsion (G,H) magnetic fields (4 Hz, 1.85 mT). The time‐lapse optical images of microrobot motion under the rolling (F) and propulsion (I) magnetic fields (12 Hz, 1.85 mT). Velocities of the tadpole‐like microrobot in the rolling mode (J,K) and the propulsion mode (L,M) against the frequency and intensity (Mean ± SD from n = 20 measurements at each experiment).