
Fig. 1.
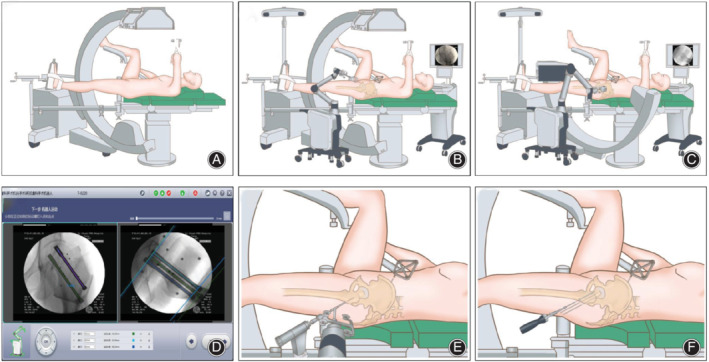
Surgical procedure of TiRobot‐assisted percutaneous cannulated screw fixation of femoral neck fractures. (A) The patient was placed in the supine position on the orthopaedic traction bed, with the injured limb fixed with continuous traction to reduce the fracture. (B, C) The tracker was installed on the robotic arm and placed near the femoral neck. Then, preoperative anteroposterior and lateral fluoroscopy images were obtained and transferred to the system. (D) The surgeon marked the locations of the screws in the software. (E) The system automatically controlled the robotic arm's movement to the planned point. Then, a guiding needle was inserted into the femoral neck through the drill sleeve. (F) Three cannulated screws were inserted in the femoral neck through each guiding needle.