
Figure 1.
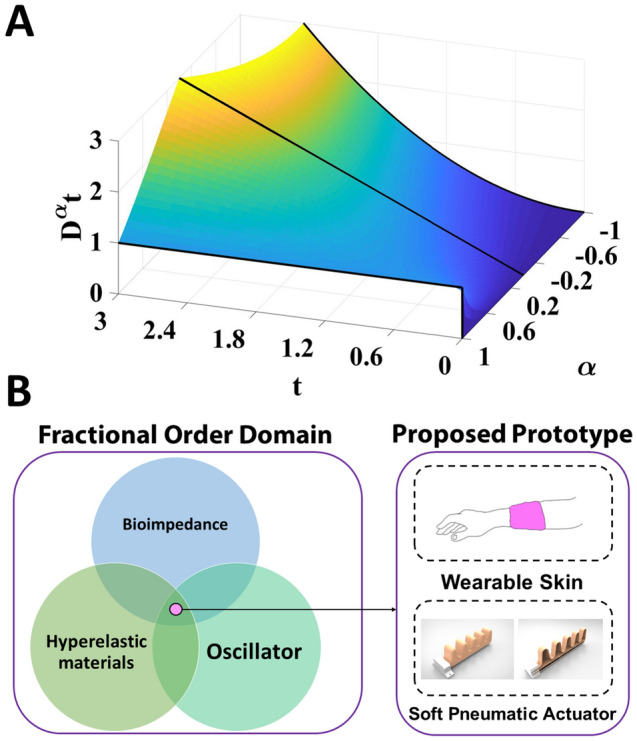
Fractional order domain and the proposed prototype. (A) The integral of step function throughout different fractional orders. (B) The proposed work is based on three main pillars; Biological impedance of tissues, hyper elastic materials and oscillators. These pillars are common for their realization in the context of the fractional order domain, and upon them our proposed prototype is based. Adding channels beneath a soft E-skin or embedded inside a soft pneumatic actuator which are filled by biological soft tissues can augment tactile sensing capability based on changes of the tissues bioimpedance.