
Fig. 8. Model for plus-end directional preference of Cin8 clusters.
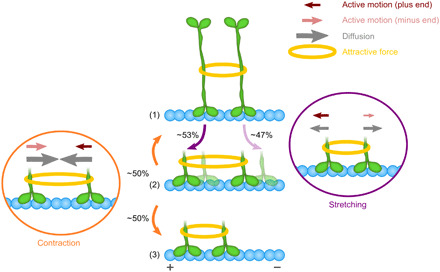
A fully contracted cluster of two Cin8 motors (1) may expand by movement of either motor away from the other (cluster stretching, right). Stretching is constrained by the attractive interaction (yellow ring), which opposes both diffusion (gray arrows) and active motion (red/pink arrows). Conversely, motor clustering implies that diffusion is suppressed exponentially, and active motion is biased toward the plus end owing to the assumed asymmetric response of the active motion of Cin8 to opposing forces (Fig. 3C). Consequently, stretching is slightly more likely (53%) to occur due to plus-end–directed motion of the left motor [opaque configuration in (2)] than by minus-end–directed motion of the right motor [transparent configuration in (2)]. Once the motors have moved further apart (2), the pair most likely contracts again [process (2) → (1) or (2) → (3)]. In the case of contraction (left), the attractive force supports both active motion and diffusion. Hence, active motion now shows a minus-end–directed bias (see Fig. 3C for supporting illustration). However, diffusive motion dominates cluster stretching, as it is supported (and not suppressed) by the attractive interaction. Because diffusive motion is inherently undirected, cluster contraction occurs almost equally often by motion of either motor (50.5% left motor; 49.5% right motor). As cluster stretching shows a weak bias toward the plus end while cluster contraction is almost unbiased, a pair of motors is more likely to move in a caterpillar-like fashion toward the plus end [sequence of processes (1) → (2) → (3)] than the minus end. The sizes of the arrows differ for illustrative purposes only; they are not proportional to the model parameters (see section SB6 for a detailed description of stochastic process and a computation of the conditional probabilities).