
Fig. 4. The second experimental setup.
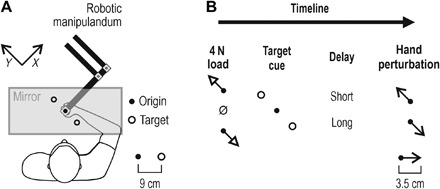
(A) In experiment 2, participants held the graspable end of a robotic manipulandum. Vision was directed at a one-way mirror, on which the contents of a monitor were projected. Hand position was represented by a visual cursor. Although not shown here, the right forearm rested on an airsled, and the hand was immobile around the wrist (see Materials and Methods for more details). (B) Timeline of experimental manipulations. Each trial began by slowly loading the hand to 4 N in the upper left direction (i.e., +Y direction) or lower right direction (−Y direction), or there was no load (“null” load). The participants had to maintain the hand immobile at origin despite any loading. One of two visual targets (+Y or −Y direction) was then suddenly cued by turning red, and this state lasted for a relatively short delay (250 ms) or long delay (750 or 1250 ms). These preparatory delays correspond to the middle of epochs 1 to 3 (Fig. 2, B and C). At the end of the delay, the hand was rapidly perturbed toward or in the opposite direction of the cued target. The perturbation lasted for 150 ms; at its end, the go signal was given (cued target turned green), and movement to the target had to be actively completed. Cursor position was frozen during the perturbation. Trials were block-randomized; hence, perturbation direction was unpredictable even after experiencing a particular load, cue, and delay.