
Fig. 10.
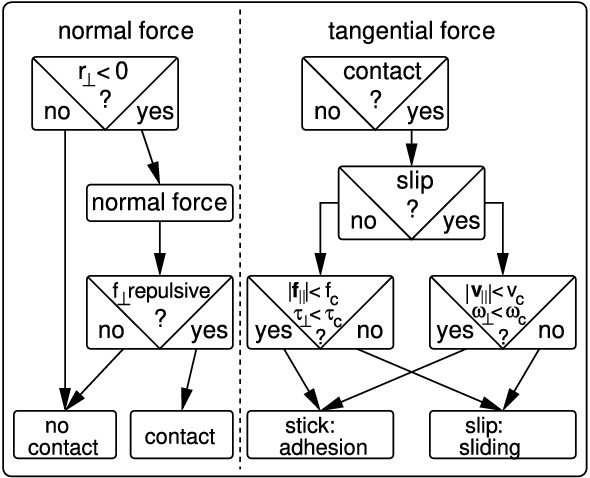
The states of a modelled point-to-plane (–) contact force interaction according to Fig. 9, and the transition criteria (decision scheme) for calculating the contact force vector (i.e. normal component > 0 and tangential components ) in this ‘to’-body–‘from’-body interaction. The critical values of tangential (linear) and torsional (angular) velocities for slip-to-stick transitions, = 0.01 m and = (with this, stick-to-slip disabled here), respectively, as well as for stick-to-slip transitions, tangential force and torsional (indicated by ‘’) torque magnitudes, = and = , respectively, with the coefficient of static friction = 0.8 (stick-to-slip disabled, thus, > 0 arbitrary), are parameters for modelling reversible transitions. The state of a contact interaction changes from ‘stick’ to ‘slip’ (based on and ), the ‘slip’ event, if either of the depicted criteria is broken, i.e. the transition to ‘slip’ occurs through a logical or connective of the ‘stick’ requirement. In contrast, the slip-to-stick transition (based on and ), the ‘stick’ event, occurs through a logical and connective of ‘back to stick’ requirement, i.e. both depicted criteria of approaching low velocities must be fulfilled. If there is no contact (anymore), the stick–slip state of a contact interaction is initialised to ‘slip’