
Fig. 11.
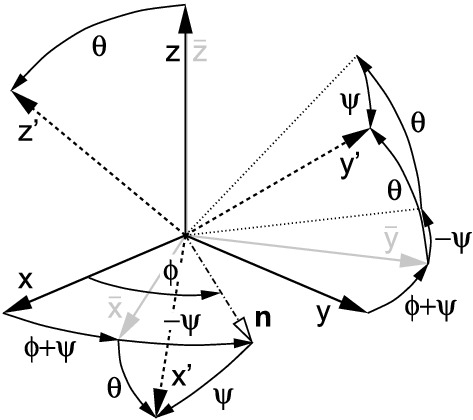
The calculation of the torsion angle and the stick coordinate system (--) at the instant of a ‘stick’ event: separating the tilt from the torsion contribution to an overall rotation of the primed coordinate system (dashed axes) relative to the unprimed system (solid axes). The rotations are expressed in terms of Euler angles executed in the order . The tilt is the (second) angular rotation by around the -axis, the latter being the intermediate -axis after the first rotation around the initial (unprimed) -axis by . The last (third) rotation by is then executed around the already finally fixed (primed) -axis. The --plane of the (solid, unprimed) system is the contact plane, in which to lie the -axis of tilting can be assumed and used for parameterising stick–slip interaction when applying the Euler angle description of three-dimensional rotations. Regardless of the angular orientation of relative to , the position of the origin of in relation to the contact plane determines (a) whether both coordinate systems (bodies) are in contact at all and, therefore, mechanically interact by a force and a torque , as well as (b) where in the contact plane a unique stick coordinate system is located for modelling a restoring viscoelastic tangential force and torsional torque in the ‘stick’ state. In fact, is fixed at the instant when the ‘stick’ event occurs: its origin is chosen to be located in the contact plane at the vector of the projection of ’s origin onto the contact plane—here, for simplicity of the illustration at ’s origin—, the orientation of ’s -axis is chosen to always align with the normal vector of the contact plane (’s -axis), and the Euler angle sum is calculated for determining later torsional angular excursions relative to the ‘stick’ condition