
Fig. 7.
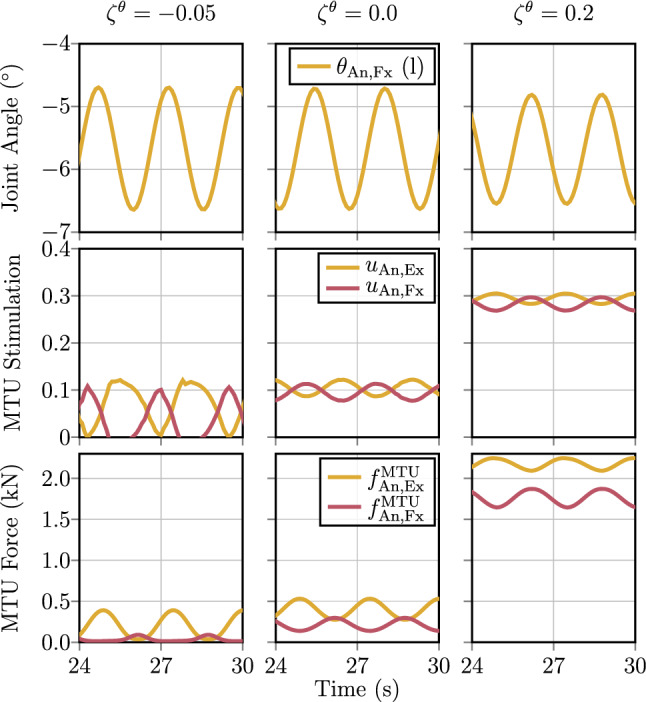
Simulation results of quiet upright stance with joint-based co-contraction variations (see Sects. 3.4 and 4.3 ). The middle graphs show the default (), where in the left column a joint-based co-contraction of in all leg joints () is used, and in the right column. In both variations, the MTU stimulations are adjusted according to and so are the respective MTU forces. The joint-based co-contraction is hereby based on the null-space of the Jacobian transformations. Due to the approximations of the associated angle–stimulation Jacobian (25), the resulting joint trajectories are slightly different