
Fig. 2.
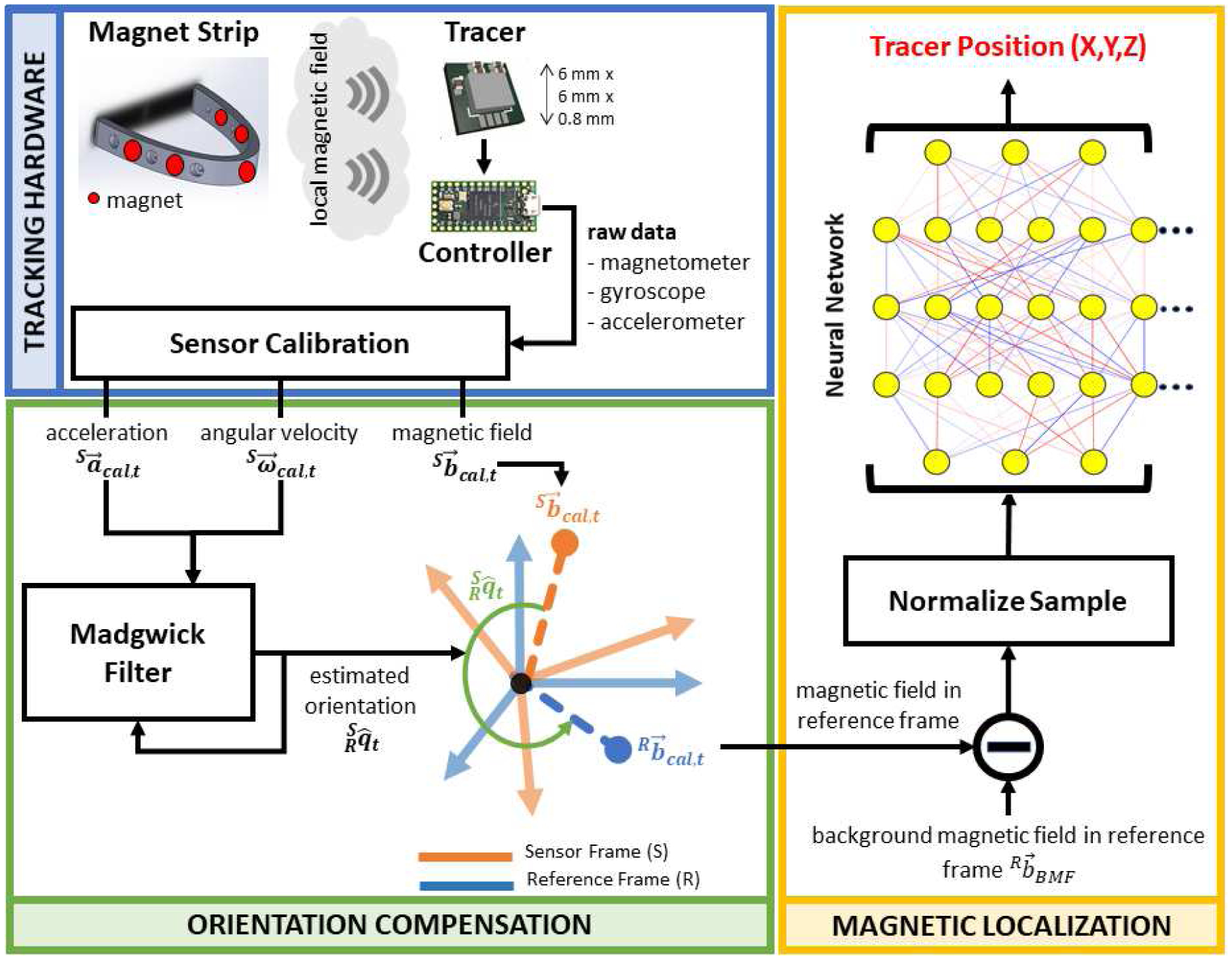
Overview of our tracking method based on a magnetic localization with orientation compensation of the magnetic field measured by the tracer’s magnetometer. The orientation of the tracer is estimated from the angular velocity and acceleration provided by its IMU and processed by a Madgwick filter. The magnetic localization is based on a neural network that estimates the tracer’s 3D position.