
Fig. 2.
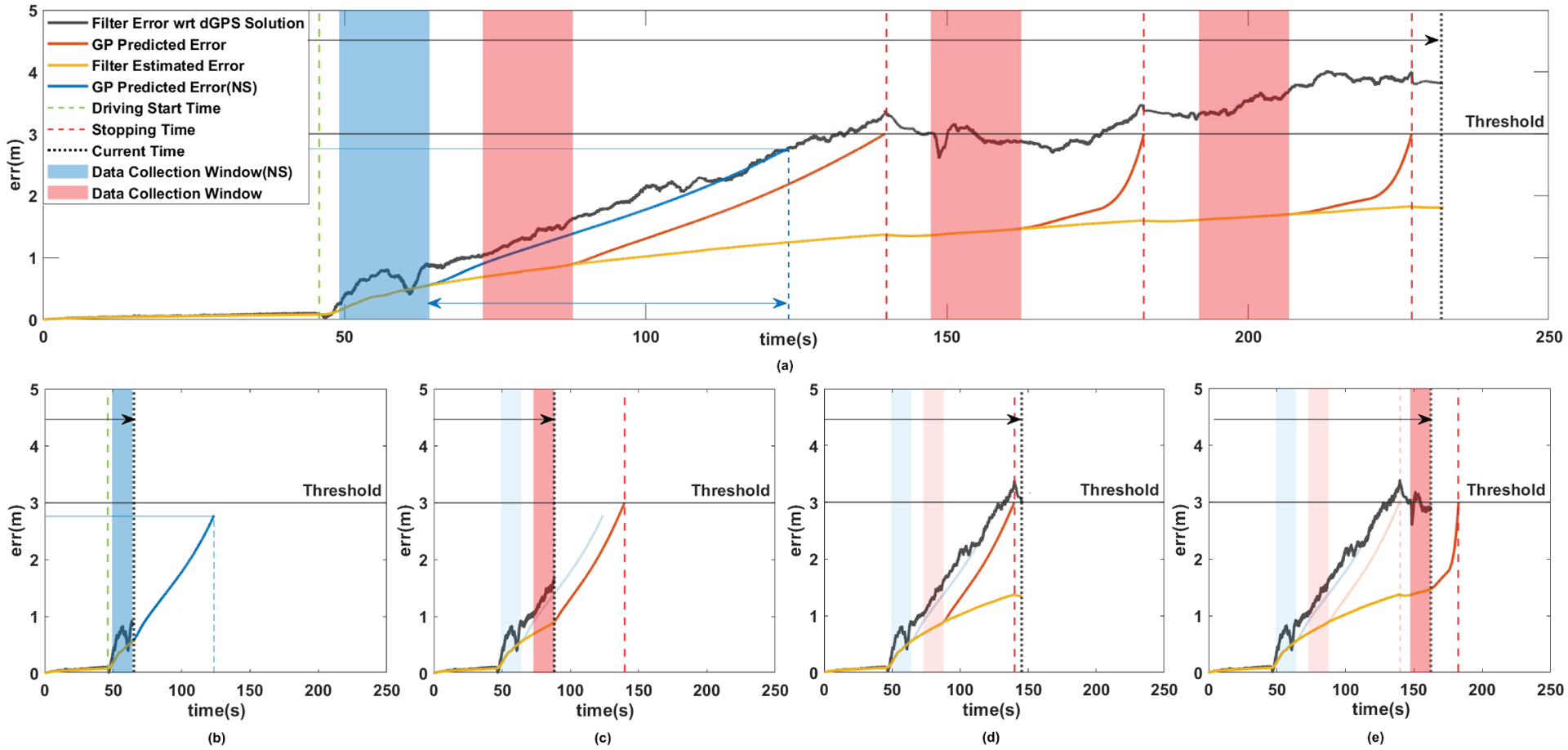
A demonstration of the on-board actions and error prediction process of the proposed algorithm. ”Filter Estimated Error” is ES-EKF provided estimation and ”Filter Error” is the difference between position truth (post-processed differential GPS solution) and the filter position estimation. The testbed rover’s average forward speed is 0.8 m/s. The algorithm only considers the slippage collection from WO and filter estimated velocity for 15s intervals. This interval for learning is set based on engineering judgement to capture the most recent (the last 12m of drive) terrain-wheel information based on the MSL Hazard Avoidance slip check interval (10m) [6]. Threshold is set to 3m and error prediction time limit is set to 60s. The prediction limit is set based on the limitation of blind-driving driving (50m) on MSL operations [6], and reliability of GP prediction over longer times. (a) Overall error prediction and stopping decision for 230s of the operation. (b) Current time = 64s. After collecting 15s of slippage data, the algorithm predicts the horizontal error for 60s. Since the predicted error does not exceed the predetermined threshold, rover continues driving. (c) Current time = 88s. Same process as (b) but this time the error prediction exceeds the threshold before the 60s prediction time limit. Algorithm sets an internal countdown for stopping at the point when the error prediction exceeds the threshold. (d) Current time = 145s. Rover stops, applies ZUPT, and starts driving again. (e) Current time = 162s. Algorithm collects data for 15s, and predicts the stopping time, repeats the process as (c). The GP prediction process took less than a second with IntelCore i7-8650U CPU (Intel NUC Board NUC7i7DN) and is negligible to show in the figure.