
Fig. 6.
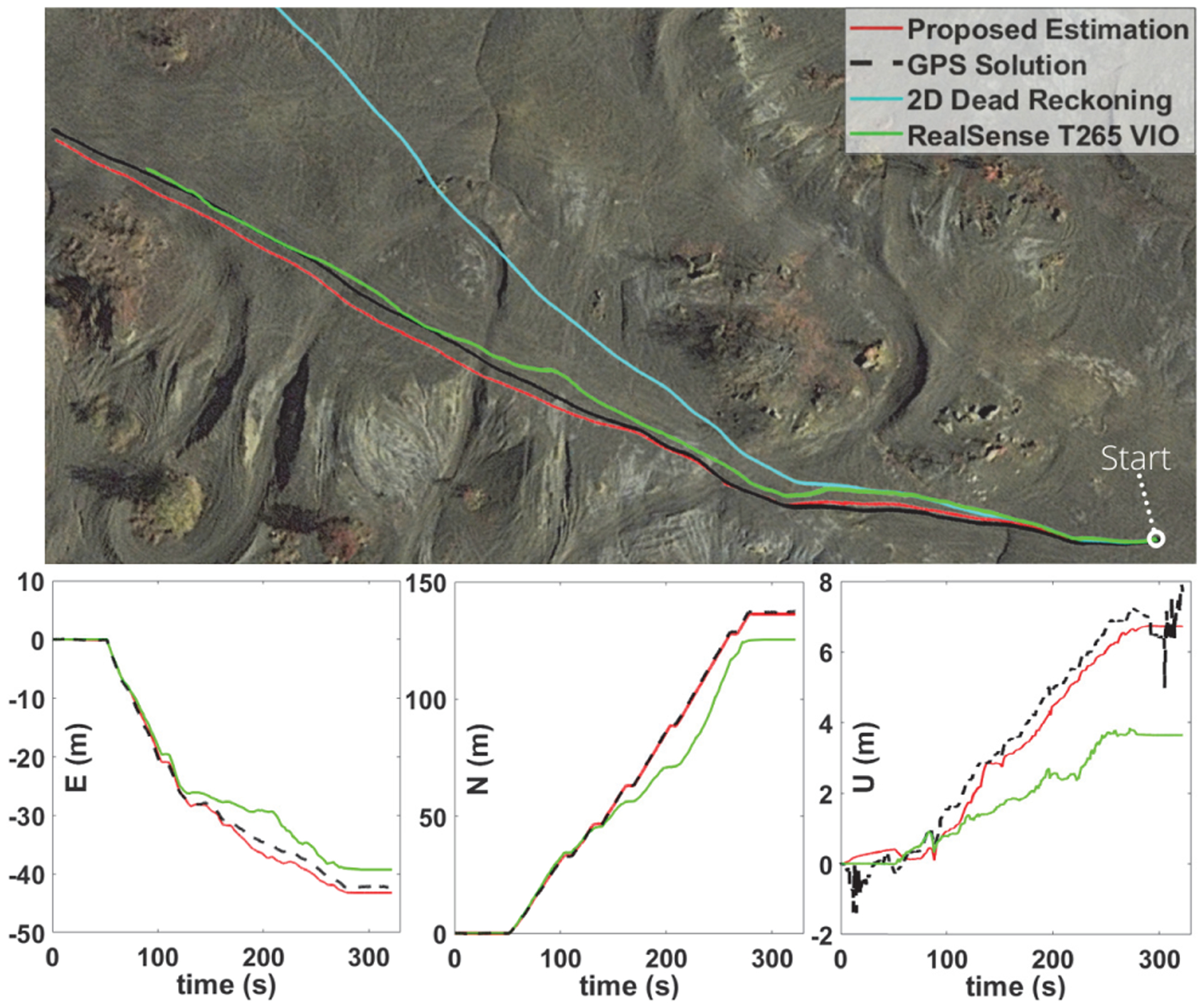
Depiction of a comparison for localization accuracy of the proposed approach (3D WIO+ZUPT) in a low-feature rough terrain against RealSense T265 [43] VIO, and 2D dead-reckoning (WIO). Traversed distance 150m. RMSE VIO = East: 2.70m, North: 10.41m, Up: 2.12m. RMSE Proposed = East: 1.03m, North: 0.49m, Up: 0.65m. A detailed analysis with several other examples is available in the VIO Analysis folder at https://github.com/wvu-navLab/CN-GP.