
Figure 2. Comparison of locomotor movements evoked by MLR-stimulation and by ES of the L5.
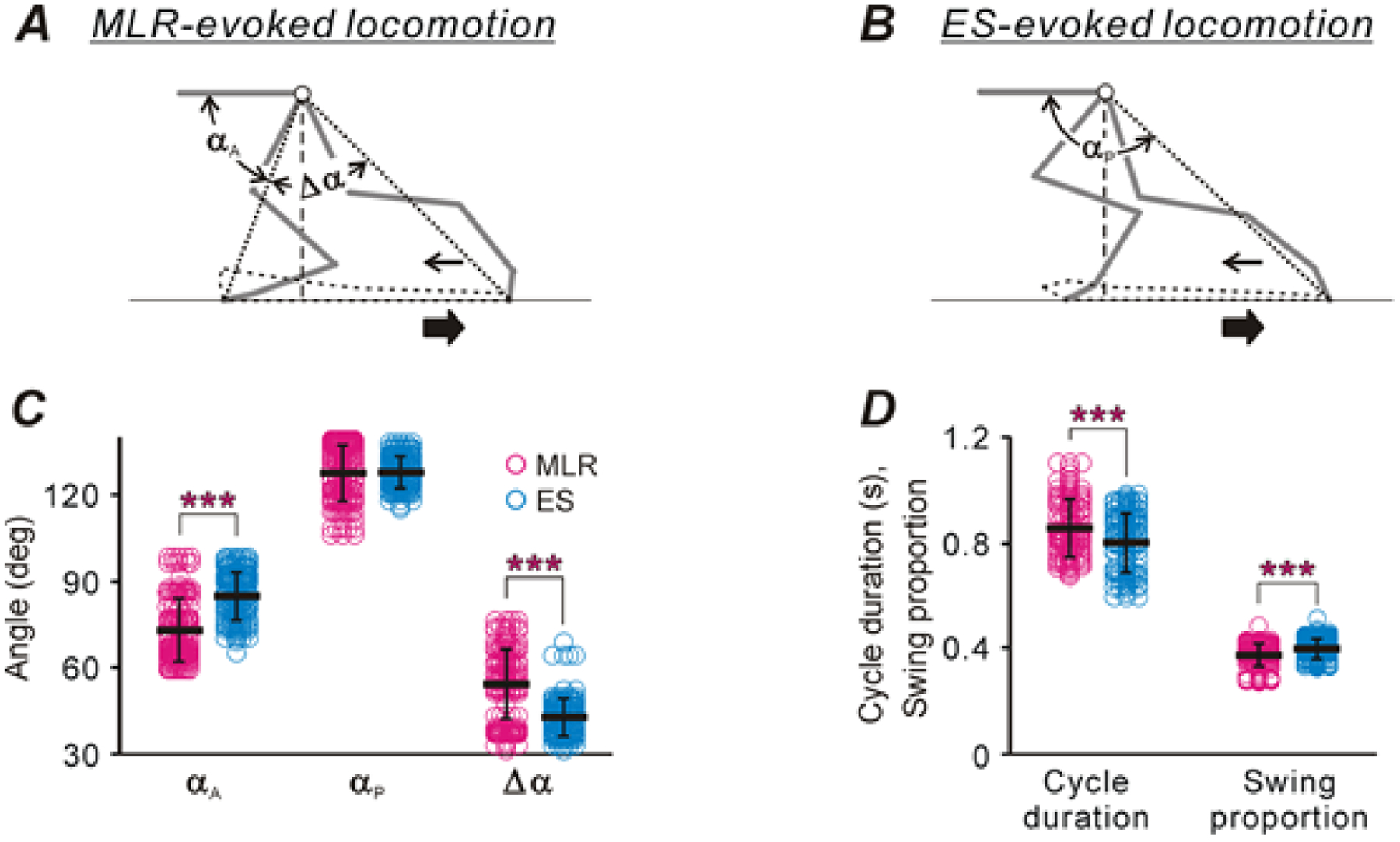
A,B, Extreme left hindlimb positions during one step cycle evoked by MLR-stimulation (A) and by ES (B). Angles αA and αP characterize the extreme anterior and posterior paw positions in relation to the trunk, respectively. Angle Δα characterizes the magnitude of limb movements. Thick and thin arrows indicate directions of the treadmill belt movement and the foot movement during swing, respectively. Note, that during stepping evoked by MLR stimulation the limb is landed at more rostral position in relation to the trunk as compared with that observed during stepping evoked by ES (compare distance between the anterior extreme paw position and the projection of the hip on the treadmill surface in A and B, respectively). C,D, Comparison of characteristics of stepping evoked by MLR stimulation and ES (mean ± SD are indicated by black lines across corresponding dot clouds showing the values of the parameter in individual cycles. In C, the number of animals, episodes and cycles analyzed during MLR-evoked as well as during ES-evoked locomotion: N=5, nep=17 and ncyc=140, respectively. In D, N=5, nep=107, ncyc=2711 were analyzed during MLR-evoked locomotion, and N=5, nep=113, ncyc=1797 were analyzed during ES-evoked locomotion. Indication of significance level: * p < 0.05, *** p < 0.001).