
Fig. 1. Method demonstration with adaptation of a two-node network.
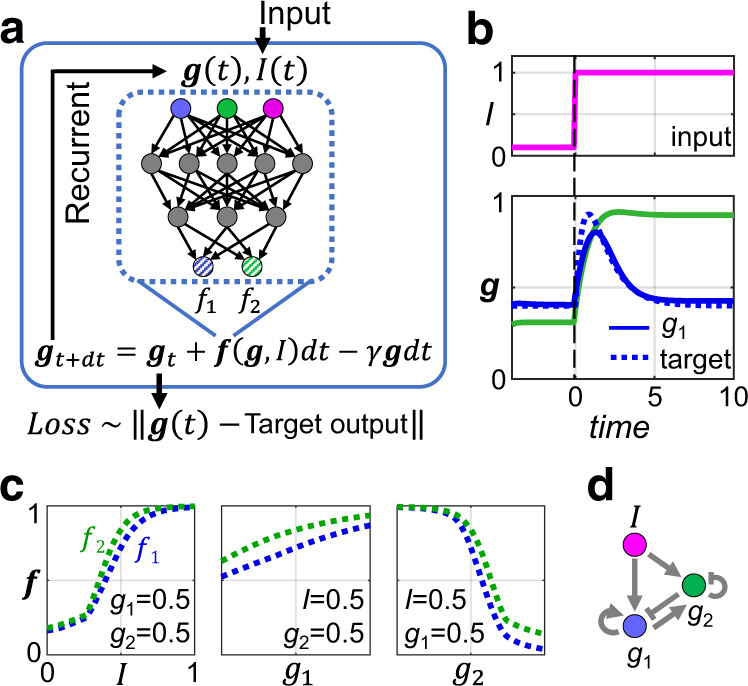
a The functional dependency of the synthesis terms f1 and f2 for g1 and g2 are evaluated by a small feed-forward NN (dashed box). f1 and f2 (shaded blue and green circles) can depend on all the three variables: g1, g2 and the input signal I. Time evolution of the dynamic system corresponds to recurrent iteration of the NN block. The output g(t) = (g1(t), g2(t)) is compared with the target value to define the Loss function for training. b We require g1 to be adaptive to the input change (pink line) and set its target time-course values as indicated by the blue dotted line. No constraints on g2 are imposed. Blue and green solid lines are the time evolution of g1 and g2, respectively, after training. c f1 (blue dotted line) and f2 (green dotted line) as functions of I, g1 and g2, after training. The three panels show their dependence on I, g1 or g2 with the other two variables fixed. In all three subpanels, the horizontal and vertical axis both ranges from 0 to 1. d The regulation network drawn from the information of (c). For example, the first panel of (c) indicates that f1 increases with I, implying I activates g1.