
Figure 4.
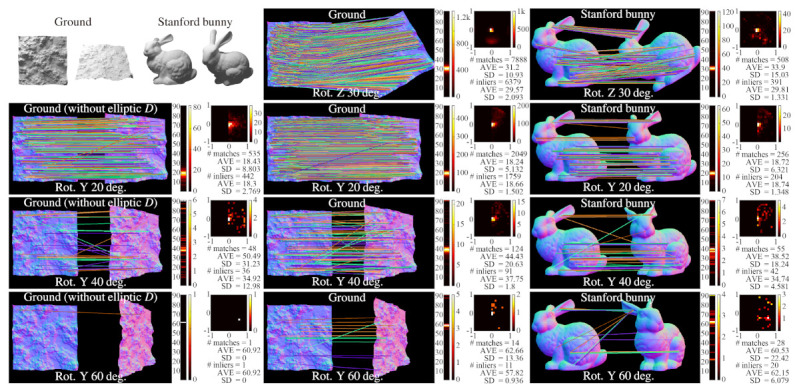
Estimated motion between images of a rigid body model, “Ground” or “Stanford bunny”, and the rotated one, using BIFNOM. For each case, a histogram and statistics for estimated rotation angles and a heat map for estimated rotation axes are described. In the heat map, XY components of a unit direction vector of the rotation axis are shown for the rotation around the Z axis, and XZ components are shown for the rotation around the Y axis, and so the ground truth will appear as a center spot. The first column shows the importance of the elliptic region D.