
Figure 2.
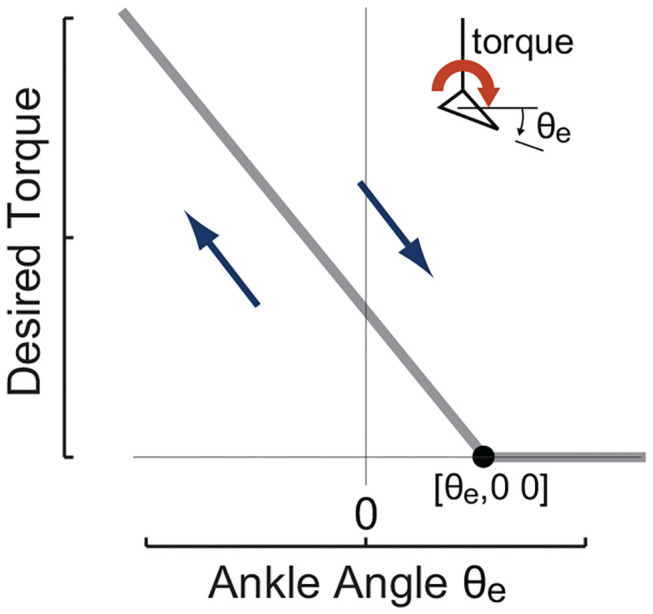
The ankle angle based high-level desired torque curve imposed in experiments to realize different desired quasi-stiffness profiles. It commands desired torque that is linearly proportional to exoskeleton joint angle θe defined by anchor point [θe,0 0] and desired quasi-stiffness Kdes.