
Figure 6.
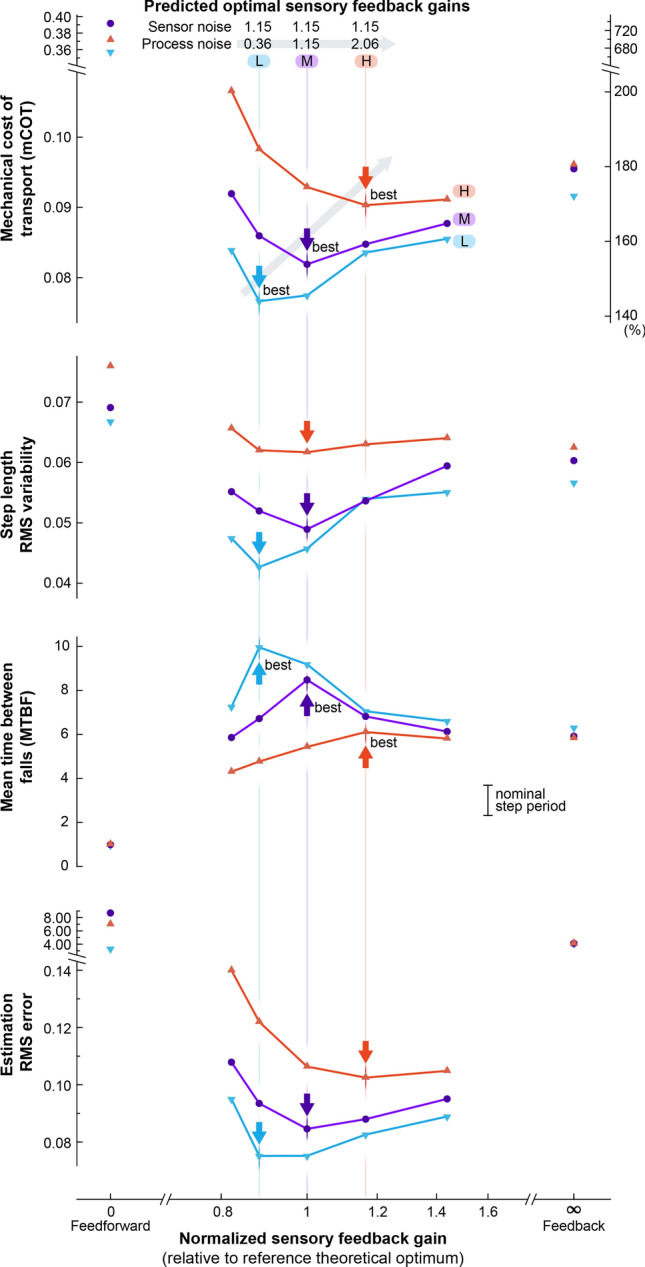
Theoretically optimal sensory feedback gains increase with greater process noise. Effect of three conditions of increasing process noise (L low, M medium, H high) on walking performance as a function of sensory feedback gain. The theoretically optimal gains (vertical lines) led to best performance, as quantified by mechanical cost of transport (mCOT, including falls), step length variability, mean time between falls (MBTF), and state estimator error. (An exception was step length variability, which had a broad and indistinct minimum.) The predicted optimal sensory feedback gains for each noise condition are indicated with vertical lines. Arrows indicate best performance for each measure for each noise condition. Performance is plotted with normalized sensory feedback gain ranging between extremes of pure feedforward (to the left) and pure feedback (to the right), with 1 corresponding to theoretical optimum of the previous testing condition (Fig. 5). The process noise covariance was set to multiples of the previous reference values: 0.36 for L, 1.15 for M, and 2.06 for H. Sensor noise covariance was set to 1.15 of previous value.