
FIGURE 3.
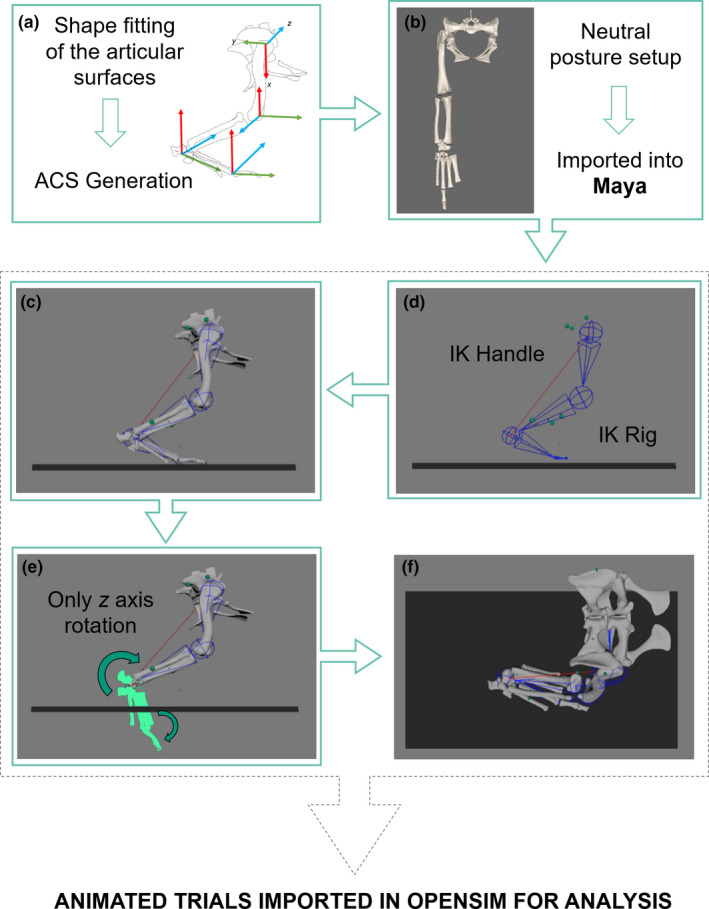
Overview of the inverse kinematic (IK) rigging approach produced in Maya. First, (a) Anatomical Coordinate Systems (ACS) were established following Kambic et al., (2014) and Bishop et al. (in review). The limb was then extended out to create a ‘neutral [or reference] posture’ (Sullivan, 2007) and this limb orientation with all bones in articulation was imported into Maya. (b). The rig was designed and guided by the position of six beads placed in the hindlimb, with the positions of each hindlimb bone constrained via an IK handle (c). The 3D animated points from XMALab were used to animate the beads in Maya, permitting the entire motion to be animated. The pelvis, thigh and shank segments required no rotoscoping as the bones were automatically placed in anatomical position informed by the movement of the beads (d). Only rotoscoping of the ankle and MTP joints (segments shown in light green) was required (e), due to no beads being surgically implanted in the foot bones. The result was a fully animated model with all bones in anatomical positions (f). For details on rig creation, refer to Supplementary Information S1. Only the right leg was modelled in Maya