
Extended Data Figure 9:
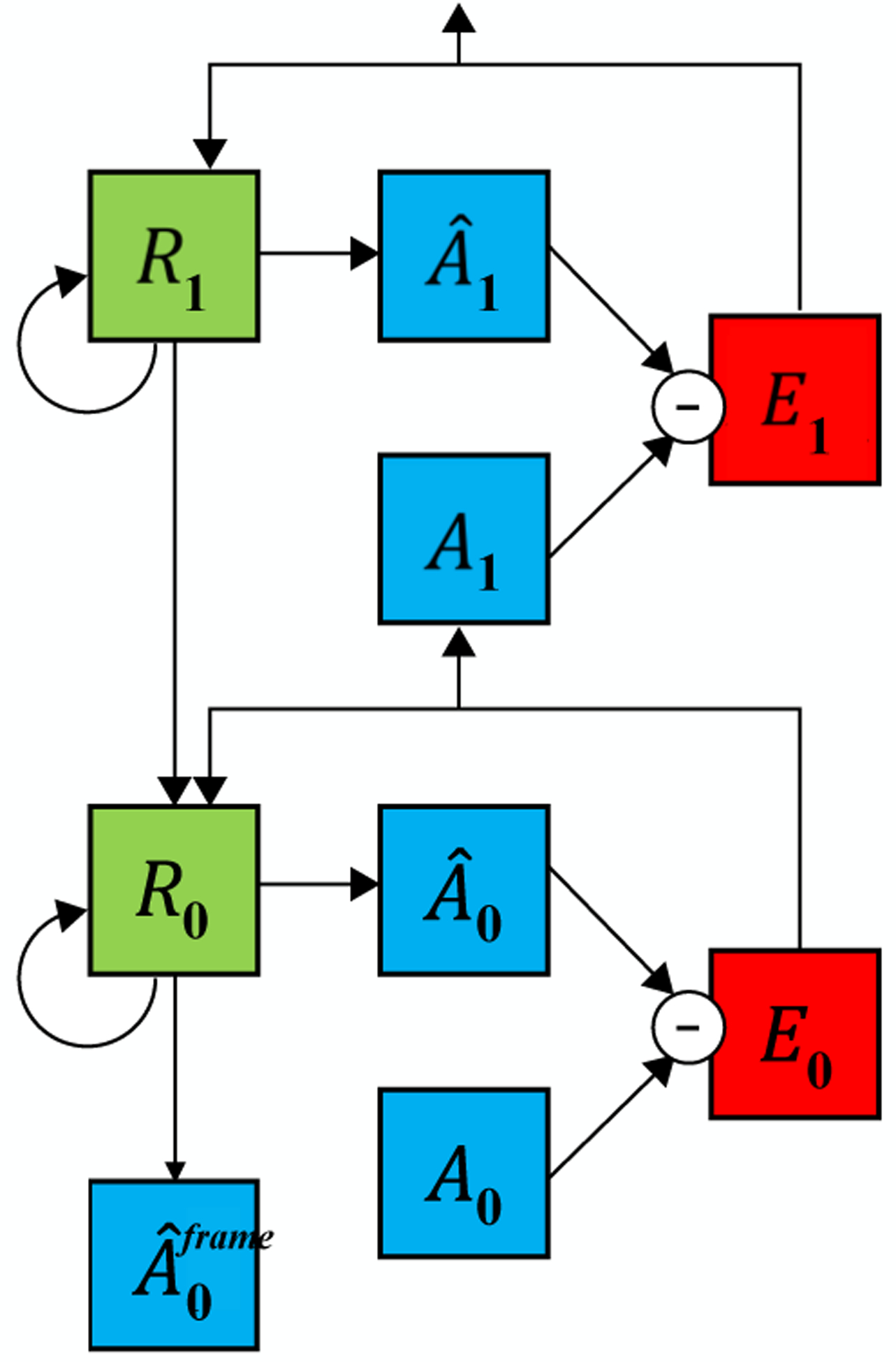
PredNet control model lacking explicit penalization of activity in “error units.” An additional convolutional block is added that generates the next-frame prediction given input from R0. The predicted frame is used in direct L1 loss, with the removal of the activity of the E units from the training loss altogether. Thus, in this control model, the E units are unconstrained and there is no explicit encouragement of activity minimization in the network.