
Fig. 13.
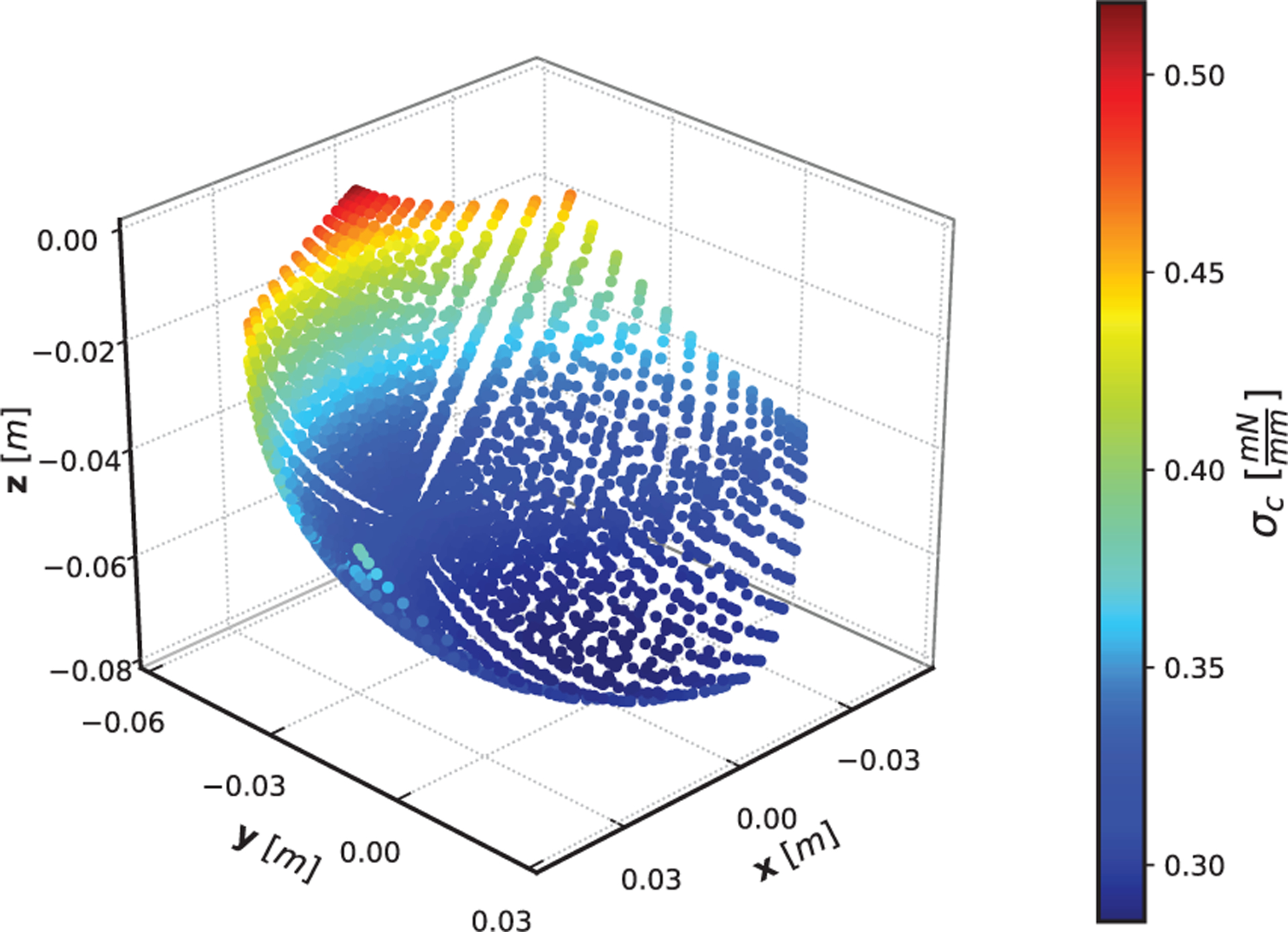
Stability test of the manipulator workspace for the initially bent case. The effective stiffness of the manipulator is not symmetric due to the rotation of the base frame. Similar to the initially straight case, the eigenvalues of the stiffness matrix remain positive throughout the entire actuation space.