
Fig. 9.
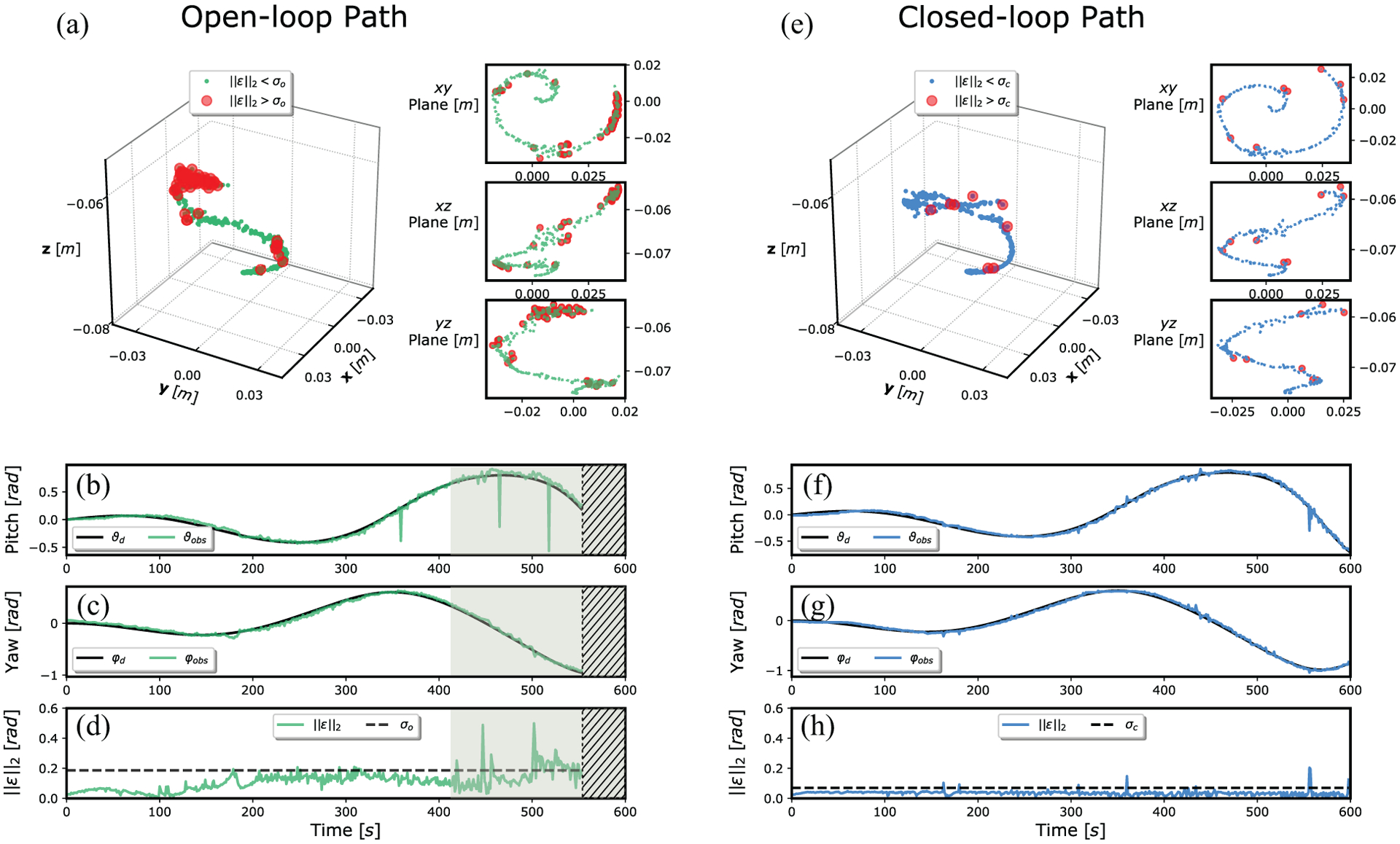
Path-following results for open-loop (left column) and closed-loop (right column) strategies applied to the HydroJet soft continuum manipulator under TFA with the base oriented parallel to Earth’s surface, such that gravity acts along the z-axis of the robot at its base (0° base angle). Graphs (a) and (e) show a 3D view of the measured path followed by the capsule-shaped tip and its projection on xy, xz, and yz planes for open-loop and closed-loop, respectively; the red dots indicate the locations of points on the path where the norm of the error was greater than a pre-defined threshold (σ = 90th percentile). The desired (black line) and measured (colored lines) paths for pitch and yaw angles are shown in (b) and (c) for the open-loop case, and in (f) and (g) for the closed-loop case. Finally, the norm of the error is presented for open-loop and closed-loop trials in (d) and (h), respectively; the threshold (dashed line) representing the 90th percentile, the region where the tip oscillations become large (shaded region), and areas where the trial was aborted due to excessive oscillations (ϑ > 0.5 rad (shaded region with hatch) are shown.