
Figure 4.
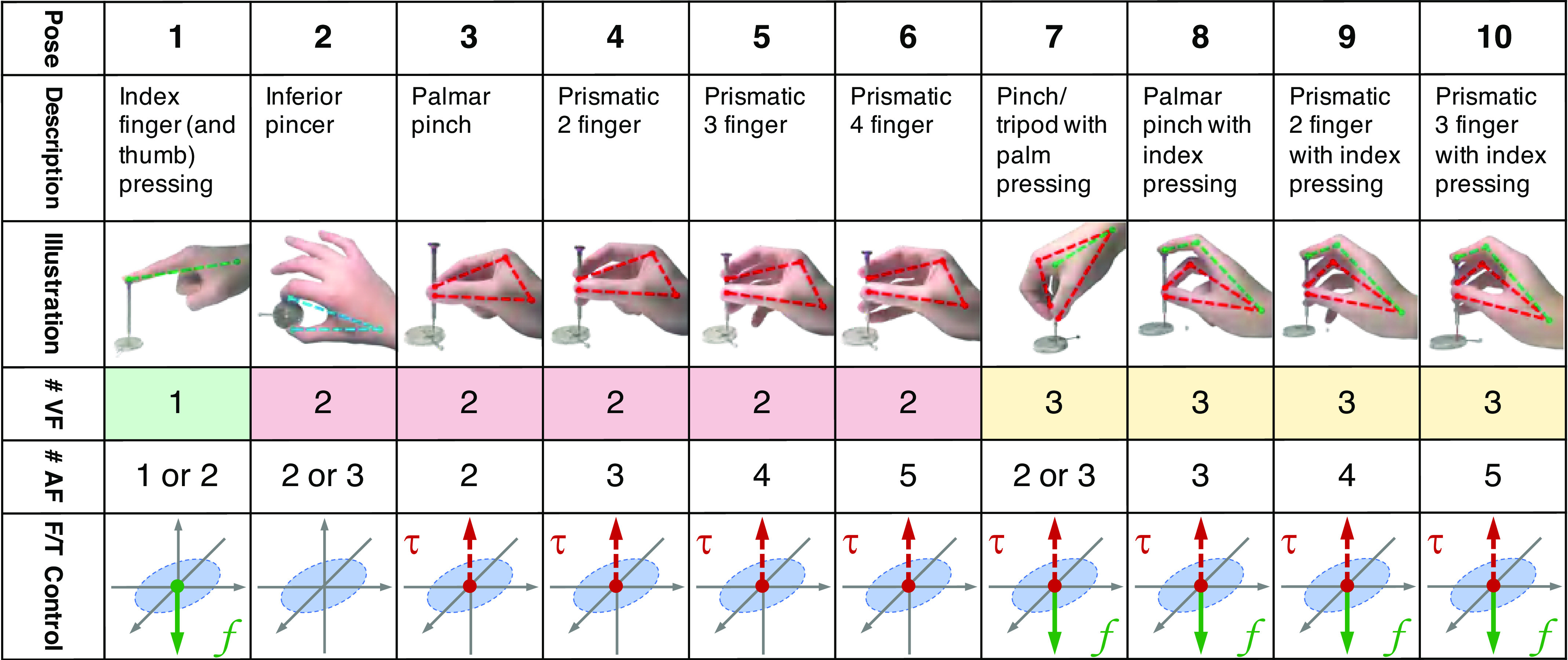
Hand pose taxonomy. For each hand pose, the number of virtual fingers (#VF) could be 1, 2, or 3. Fingers are represented by numeric values (1: thumb, 2: index finger; 3: middle finger, 4: ring finger, and 5: little finger) and letter P for palm. The number of real fingers used to complete the task was registered as the number of active fingers (#AF). Vectors in the task coordinate frame (F/T Control) represent the force or torque that could be generated by manipulating the tool using the corresponding hand pose. The solid and dashed vectors denote continuous and discontinuous maintenance of force or torque. The light blue ellipsoid indicates the region of potential disturbances. Poses 1, 7, 8, 9, and 10 are specific to tasks in this study and have not been reported previously.