
Figure 2.
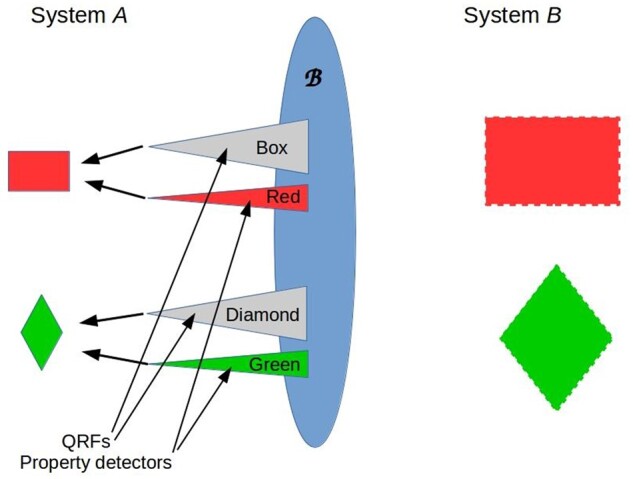
Simplified cartoon of feature or object perception in MP. The depicted relationship between A and B is topological: they are separated by the boundary . There is no implied geometry, and the interaction is bipartite: there is no third system “outside” U = AB with which A or B interact. Features or objects “embedded” in the environment B are perceptible only by systems A equipped with QRFs and property detectors that render the features/objects both detectable and meaningful, and are defined only relative to such systems; this lack of observer-independent ontology is indicated here by dashed boundaries. Triangles within A suggest the form of classifier cocones when drawn as diagrams (Fields and Glazebrook 2019a,b; 2020a,b,c); arrows indicate binding operations. The analogy with mammalian visual feature detection is obvious; see Fields and Glazebrook (2019b) for a detailed formal construction.