
Fig. 1.
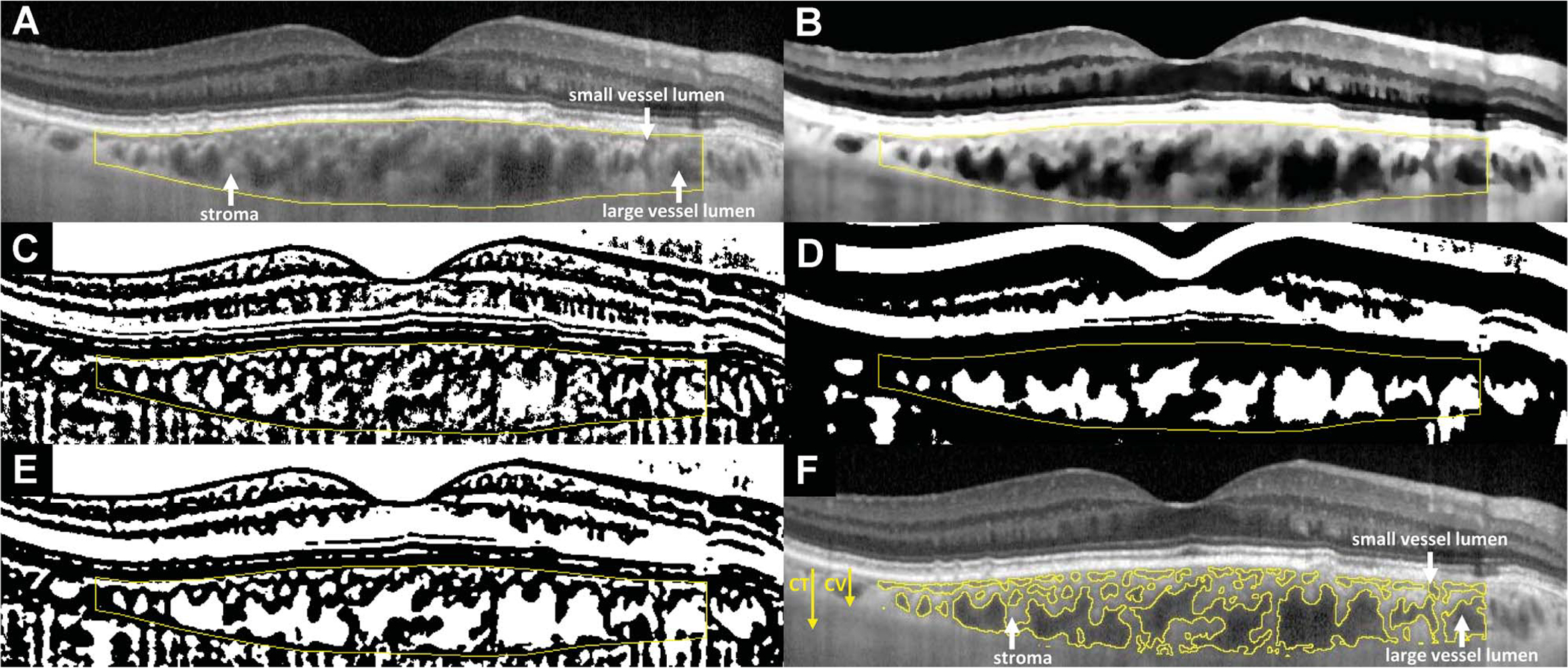
Choroidal segmentation algorithms used for the analysis of EDI-OCT images to calculate choroidal parameters. Horizontally oriented EDI-OCT B-scans traversing the center of the fovea were analyzed. Manual segmentation of the inner and outer borders of the choroid (A) was performed over the central 6-mm zone (3 mm on either side of the foveal center). These segmentation lines outlining the overall dimensions of the choroid were used in the computation of CT. For the segmentation of individual vascular spaces in cross-section from the nonvascular stroma, the original EDI-OCT image first underwent contrast enhancement, passage through a bilateral filter, and normalization to produce the processed image (B). Image binarization was performed once on the processed image for an optimized segmentation of small choroidal vessels using the Niblack autolocal threshold tool (C). A second separate image binarization procedure was performed on the processed image for a differently optimized segmentation of large choroidal vessels using Niblack thresholding with altered parameters (D). The two binarized images were then combined to produce a multiscale image, which underwent additional despeckling (E). This eventual image was then segmented into areas with contiguous black or white pixels, with the segments containing white pixels representing vascular luminal spaces, and the segments containing black pixels representing nonvascular choroidal stroma (F). Choroidal thickness arrow: CT, in μm, was defined as the total area of all pixels (black and white) within the segmentation outlines of the choroid, divided by the length of retina assayed (central 6 mm). CV arrow: CV thickness (in μm) was defined as the area of all white pixels (choroidal vascular spaces), divided by the length of retina assayed (central 6 mm). Hence, CT (all pixels) = CV (white pixels) + choroidal stromal thickness (black pixels). Choroidal vascularity index was defined as the ratio CV:CT, expressed as a percentage.