
Figure 1: Closed-loop optogenetic control using state-space linear dynamical systems models.
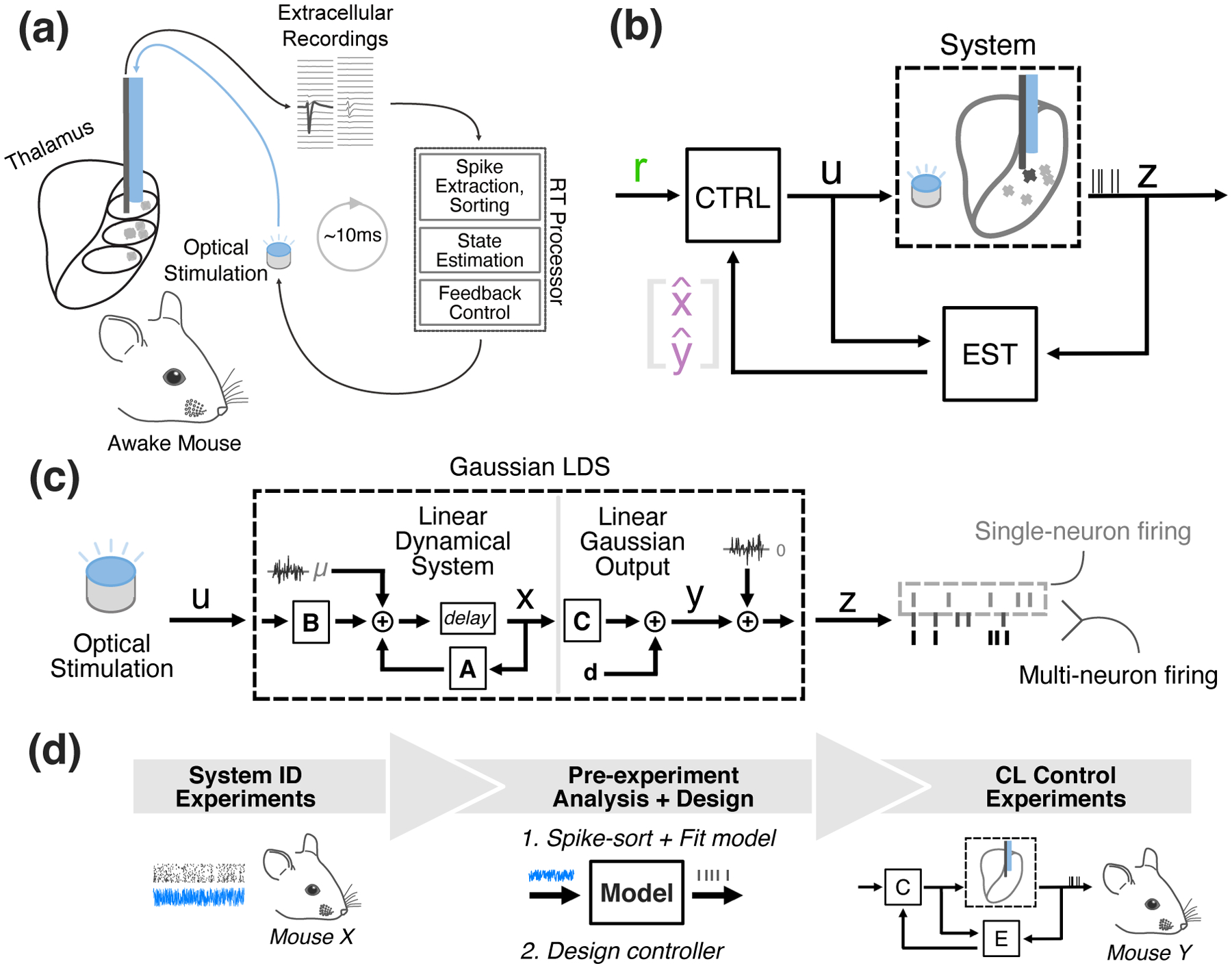
(a) Experimental Setup. (b) Control system block flow diagram. Spiking activity is fed back to a model-based estimator (‘EST’), which provides online estimates of the underlying state of the system (x) and the output (y), which is firing rate in the current application. The controller (‘CTRL’) uses a model to generate the system setpoint that corresponds to user-specified reference firing rate (r). An updated control signal is generated using feedback controller gains and the error between this setpoint and the online estimates of the system state/output. The updated control signal is sent to an LED driver to modulate light intensity. (c) Structure of the Gaussian LDS Model. The GLDS used throughout the control loop consists of a linear dynamical system (LDS) describing the evolution of the state (x) and a linear remapping of x to the output firing rate and eventually measured spiking (z). This model is used for single-neuron and multi-neuron estimation/control. (d) Workflow for closed-loop experiments. Neuronal responses to optical noise recorded in previous experiments (left) were used to fit state-space models and design the control system (middle). The resulting model-based control system was used in subsequent CL control experiments (right).