
Fig. 1.
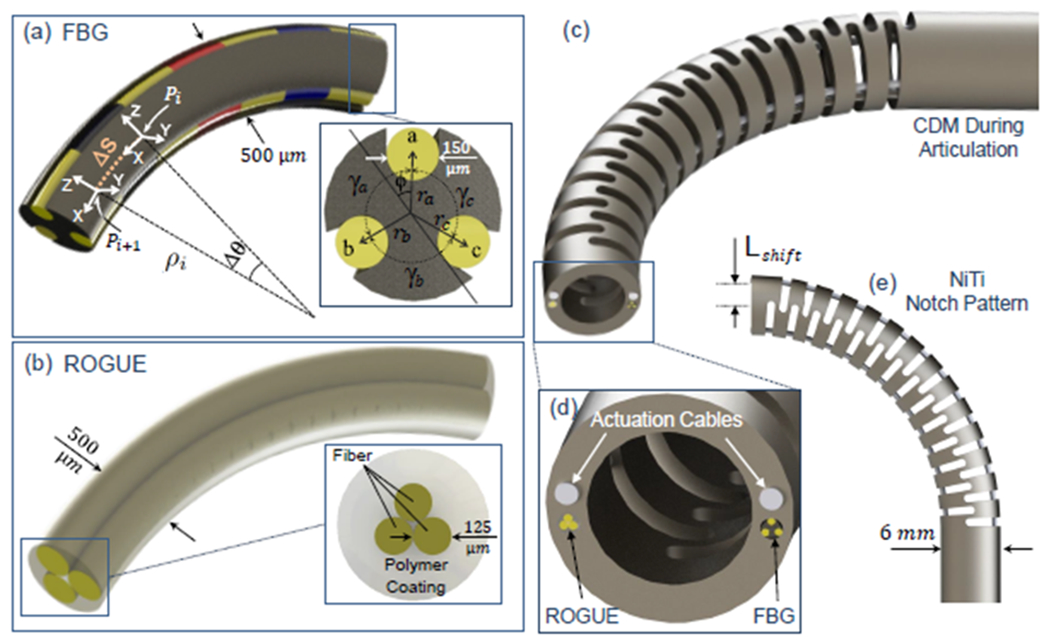
(a) the FBG fiber triplet with three active areas, (b) the ROGUE fiber triplet with distributed sensing, (c) CDM during articulation, (d) CDM tip view showing the actuation cables, the FBG, and the ROGUE triplet integrated into the CDM, (e) NiTi notch pattern in the CDM design