
Fig. 4.
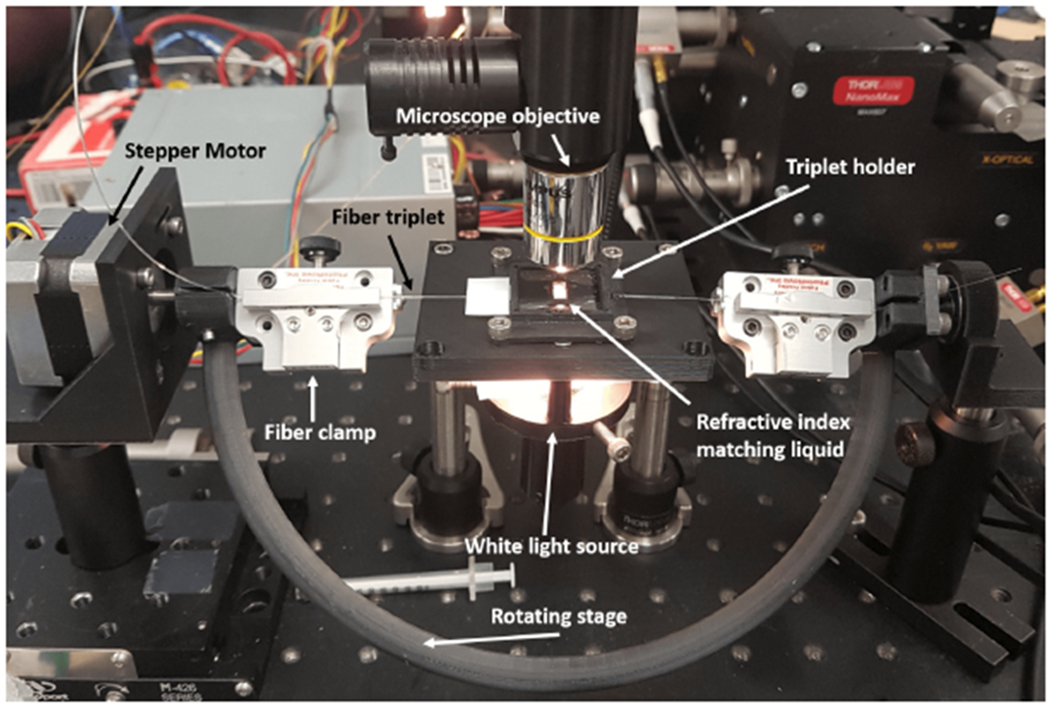
Tomography calibration setup. The fiber triplet is held by two fiber clamps (PhotoNova Inc.) that are rotated by a stepper motor across 180°. Every 0.9°, a camera captures the transmitted image, magnified by a microscope objective. A 3D printed triplet holder maintains the triplet in position, but allows it to rotate freely. The triplet is bathed in a refractive index matching liquid that diminishes the refractive index variation between the polymer and the ambiant air.