
Fig. 8.
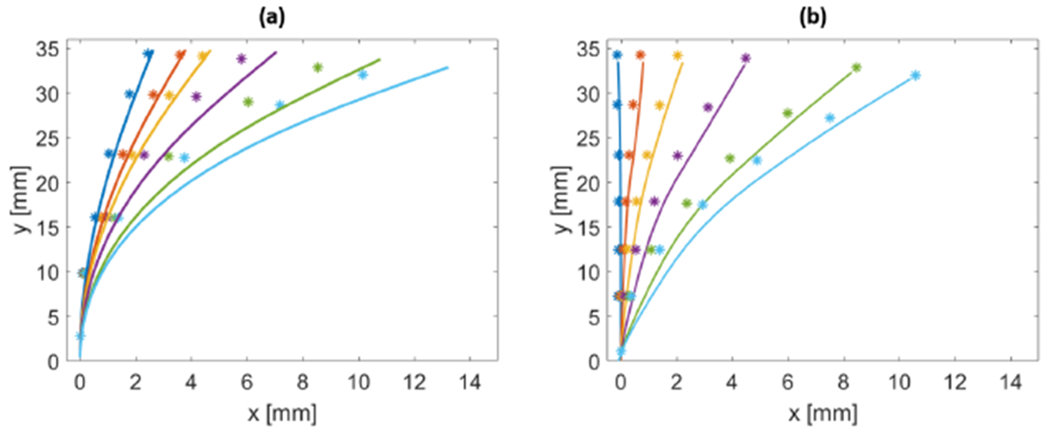
Free-bending CDM reconstruction using (a) the FBG-based sensor and (b) the ROGUE-based sensor. In both cases, the asterisk markers show the ground truth, obtained by the pair of stereo cameras, while the solid line show the reconstructed shape, in 2D.