
Fig. 1.
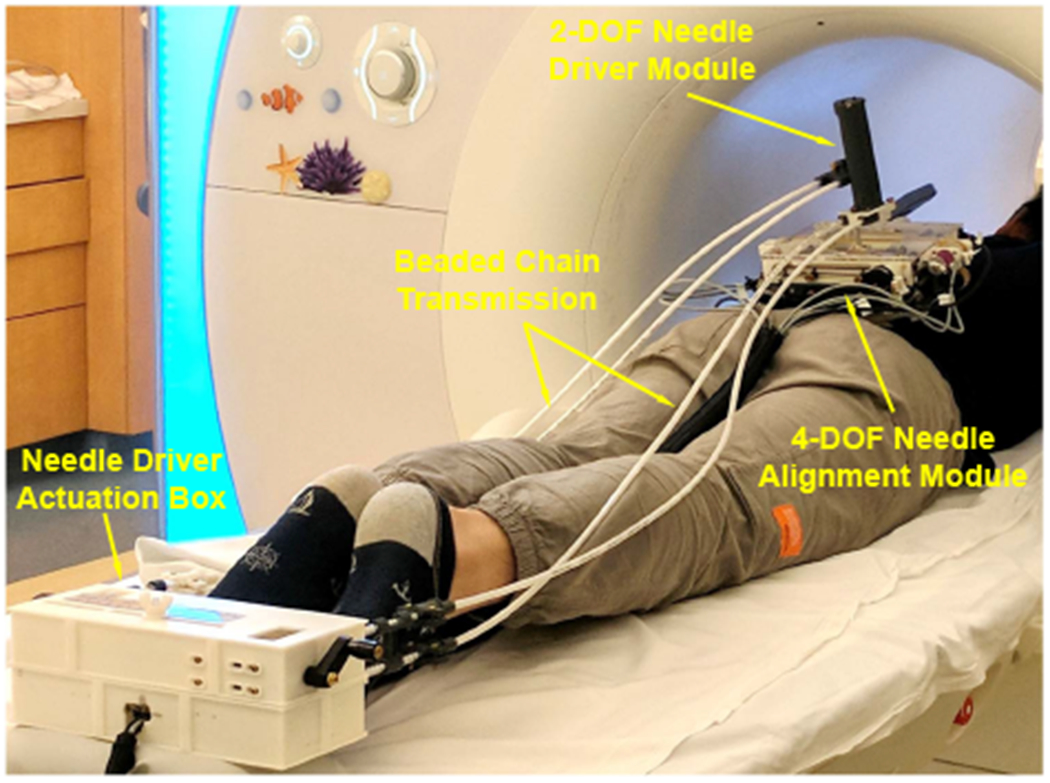
System setup of the robotic assistant inside an MRI scanner. A volunteer was placed on the scanner table in prone position and the robot was attached to the back using straps. The 2-DOF needle driver was remotely actuated through beaded chain transmission by the actuation box placed at the end of the table.