
Fig. 7.
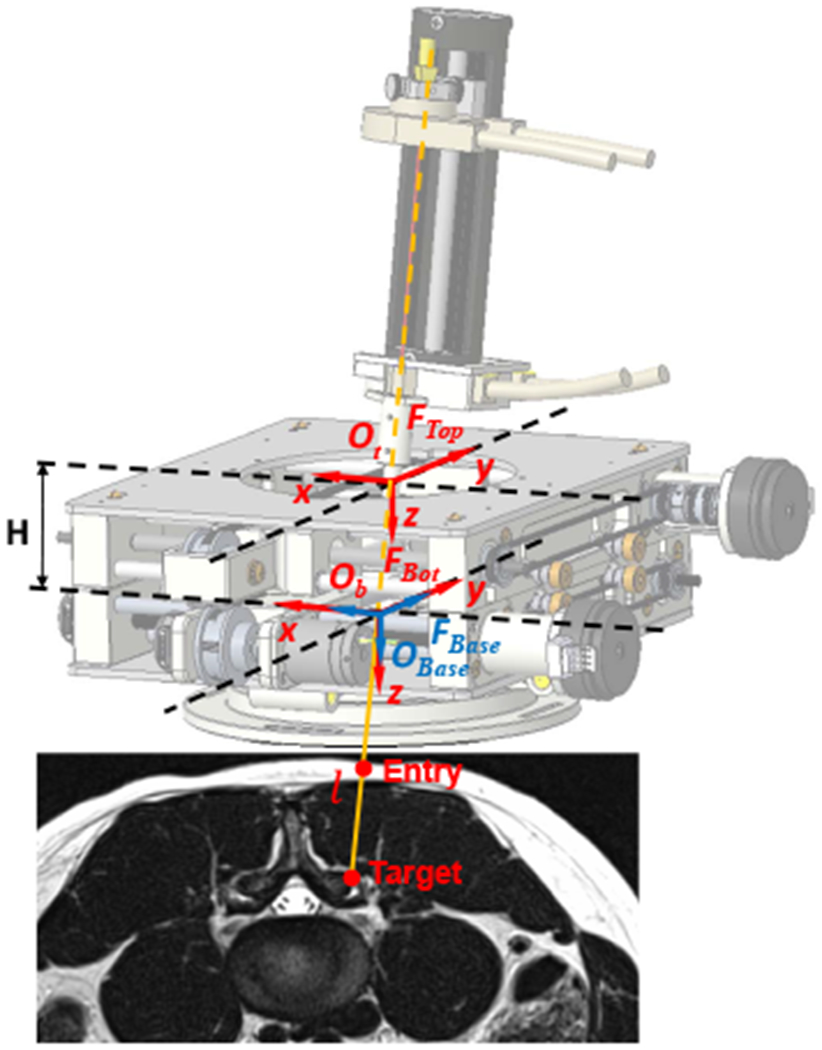
Coordinate frame assignment of the robotic assistant, overlaid on an MR image of lumbar spine. The robot base frame FBase (non-moving frame) and bottom stage frame FBot (moving frame) are defined at the center of universal joint of the bottom stage, and the top stage frame FTop (moving frame) is attached to the center of ball joint. The target and entry points are determined in the intraoperative images.