
FIGURE 5.
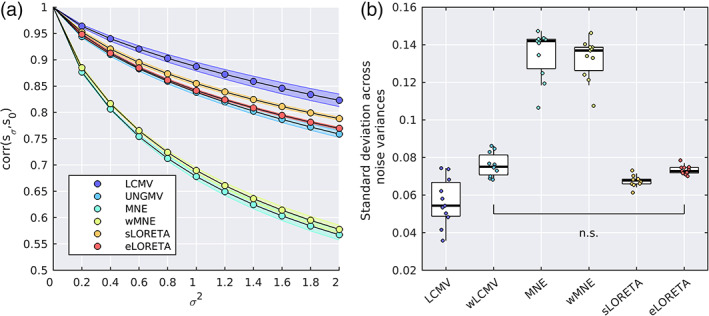
Correlation between source space solutions as sensor noise is added. Noise was added to the sensor data with variance , where is the sensor data covariance matrix and is the number of sensors. We denote as the source space solution to the noisy sensor data (without cross‐validation). The regularization parameter was adjusted according to the new predicted SNR due to added noise. (a) Correlation (averaged over dipoles) between and (i.e., the source‐spaced solutions with and without noise added respectively) against noise variance . Shaded areas shown standard error of the mean. (b) The standard deviation of across noise levels, which (due to the monotonic decrease in correlation scores as noise increases) quantifies the extent to which an algorithm's solution changes as noise is artificially added. There was a significant difference between all pairs of algorithms except those marked nonsignificant (n.s.)