
Figure 1.
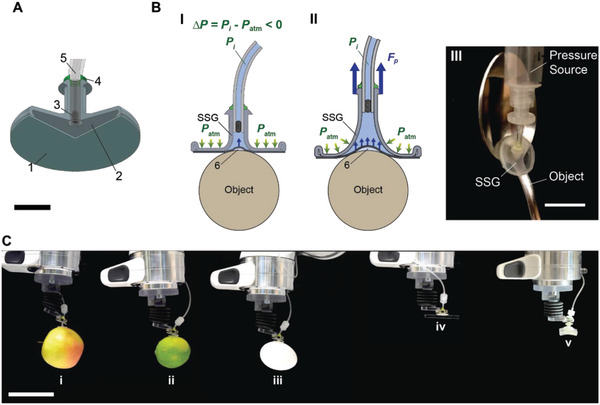
Soft suction gripper (SSG) with a self‐sealing, flat elastic membrane for pick‐and‐place of real‐world parts with various 3D shapes, sizes, textures, and materials. A) A cross‐section of the 3D assembly of the SSG. 1: flat membrane (FM), 2: suction chamber (GB), 3: filter, 4: vinylsiloxane, 5: tubing. Scale bar: 5 mm. B) A schematic image of the SSG, (I) engaging with a part smaller than the gripper diameter and (II) supporting the part's weight with expanded suction area. 6: A suction cavity between the adhering membrane and the part. (III) A photographic image of the SSG holding an irregular part with a contact area smaller than the gripper. Scale bar: 18 mm. C) The SSG holding various parts with a broad range of surface roughness, fragility, shape, and weight. i: apple (107 g), ii: lime (53 g), iii: egg (63 g), iv: rectangular bar (2 g, 5 mm in width, PMMA), and v: a block of gelatin (5 wt%, 3.5 g). Scale bar: 100 mm.