
Fig. 1.
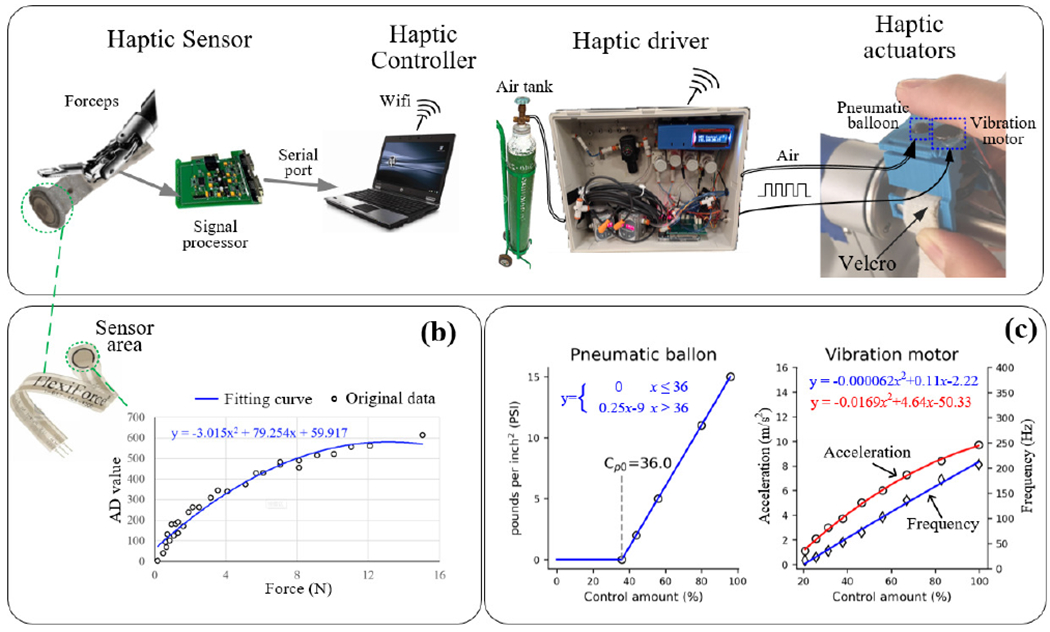
Block diagram of the hardware of haptic feedback system for the surgical robot. (b) Output characteristics of haptic sensor (FlexiForce A201 force) detected by 10-bit AD converter. (c) Output characteristics of pneumatic balloon (left) and vibration motor (right) under different controlling amounts.