
Fig. 1.
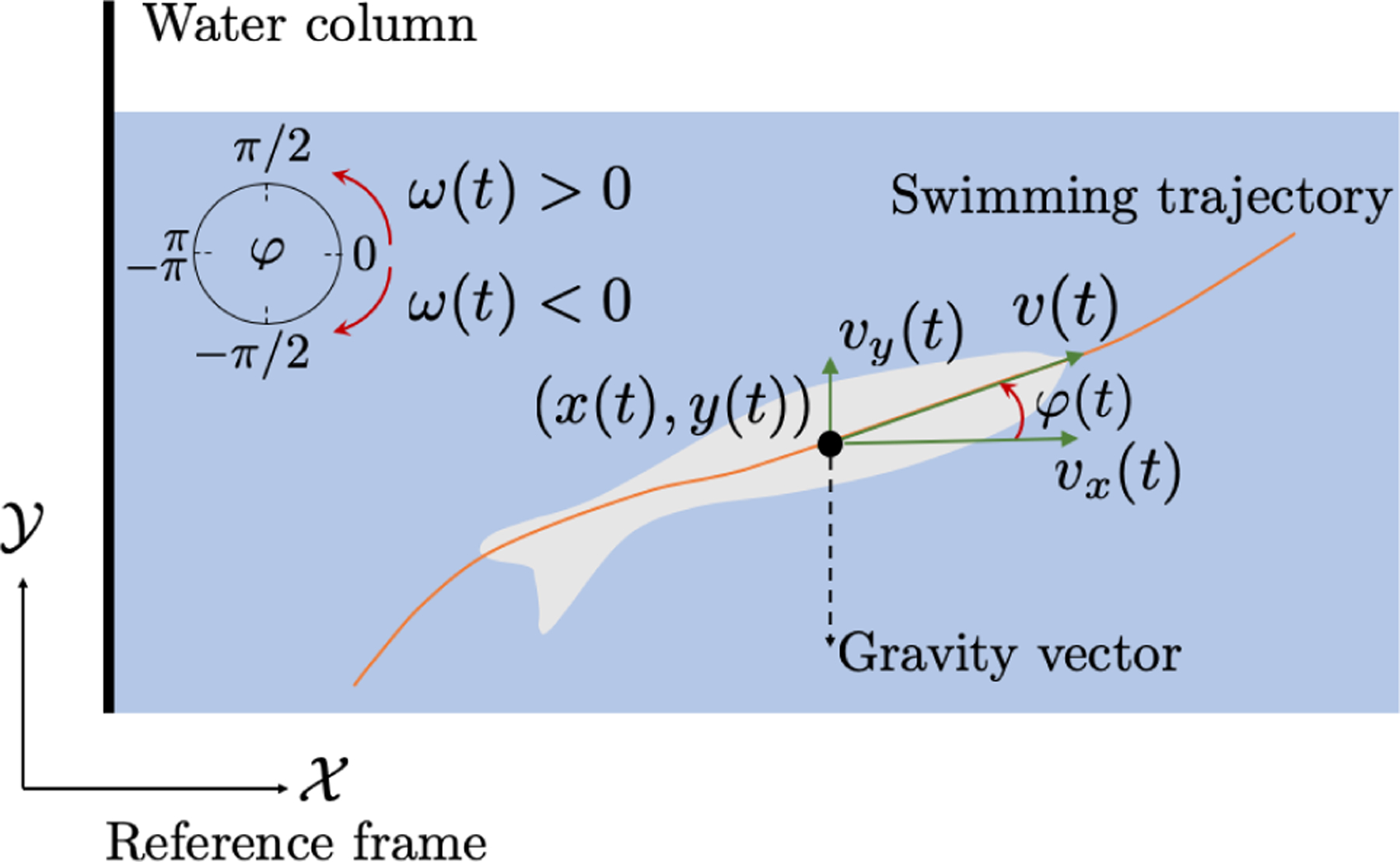
Illustration of a zebrafish swimming trajectory. The tracking software identifies the centroid (x(t), y(t)) for each frame providing a time series of positions along with estimates of the velocity components υx(t) and υy(t). Swimming trajectories are further utilized for estimating the turn rate ω(t) and heading angle φ(t) of the fish.