
Figure 5.
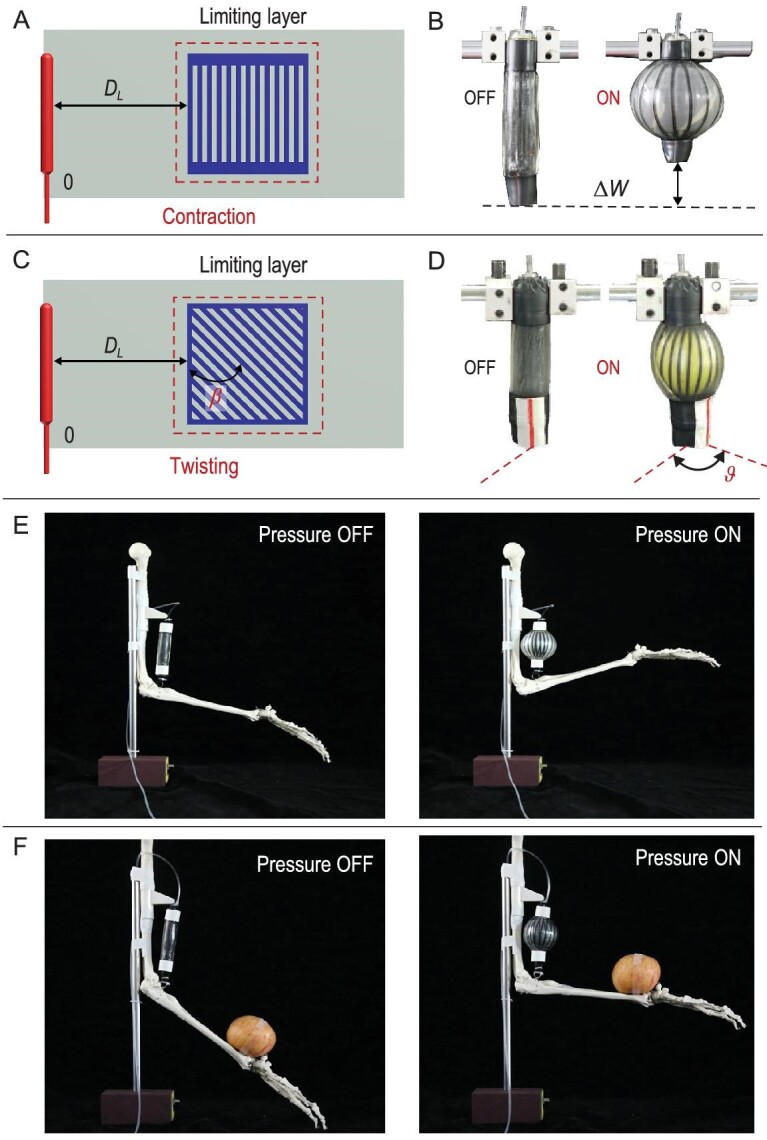
The MAIPAM with non-stretchable materials for contraction and twisting actuation modes. (A) Schematic of the 2D-based design pattern of the contracted MAIPAMs. Based on the elongated MAIPAM (Fig. 2A), a contracted MAIPAM is designed by assembling a non-stretchable laser cutting layer in the passive 2D elastomer membrane. (B) The working principle of the contracted MAIPAMs: upon compressed air, it can generate a contracted displacement  . (C) The 2D-based design pattern and assembly of the twisting MAIPAMs, achieved by tuning the angle
. (C) The 2D-based design pattern and assembly of the twisting MAIPAMs, achieved by tuning the angle  of the limiting layer in (A). (D) The working principle of the twisting MAIPAMs: upon compressed air, it can generate a twisting angle
of the limiting layer in (A). (D) The working principle of the twisting MAIPAMs: upon compressed air, it can generate a twisting angle  . (E) Application of the contracted MAIPMA for driving a robotic arm (Movie S6). (F) Photographs of the robotic arm lifting an apple of weight 200 g (Movie S6).
. (E) Application of the contracted MAIPMA for driving a robotic arm (Movie S6). (F) Photographs of the robotic arm lifting an apple of weight 200 g (Movie S6).