
Fig. 2.
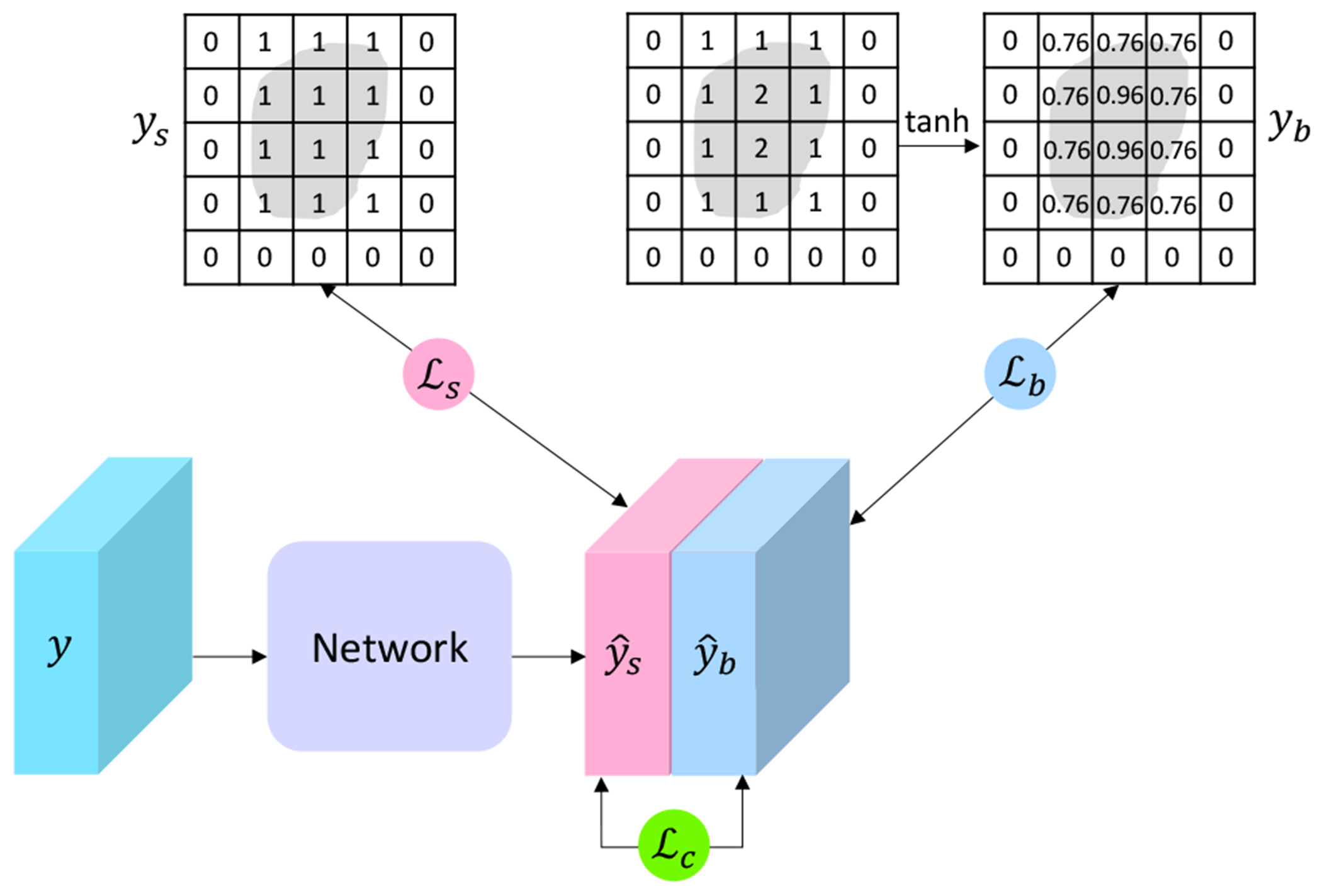
An illustration of the proposed label augmentor (LA) as detailed in Section III-B. For each voxel i of the input volume y, LA augments its label to a vector , where is the segmentation label and is the boundary label. The gray areas indicate the same cleft. The boundary labels yb are computed using tanh distance map (TDM) as shown in the figure. The same network with weight sharing is employed to learn predictions on the two sets of labels. The segmentation loss for the volume y is achieved from the segmentation predictions and segmentation labels ys. The boundary loss is calculated from the boundary predictions and boundary labels yb. The coherence loss is computed based on the divergences between predictions and .