
Figure 3.
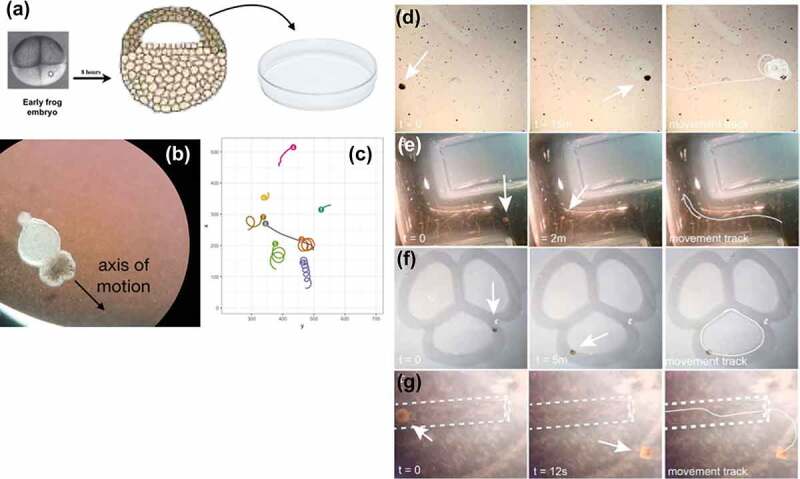
Xenobots, an example of a novel proto-organism with unknown learning capacity
Xenobots result when a frog embryo’s ectodermal cells are explanted into a petri dish (A), and sculpted in various ways as dictated by an evolutionary algorithm running in a virtual world [42,43]. They form a ciliated construct that swims on its own power (B) and exhibits all sorts of diverse motion patterns, especially when tracked in a swarm context (C, courtesy of Simon Garnier). Xenobots have interesting behaviors such as circling features in the environment (D, white arrow indicates a Xenobot orbiting a speck of material), traversing mazes (E, F), and moving through tubes (G). Their learning capacity is as yet unknown, and represents a key area for current investigation using the methods described herein. Panel A – from https://www.mussenhealth.us/growth-cones/conservation-of-neural-induction.html . Panels B,C courtesy of Douglas J. Blackiston, Levin lab. Panels D-G re-used with permission from [42].