
. 2021 Dec 13;4:761123. doi: 10.3389/frai.2021.761123
Copyright © 2021 Frahi , Sancarlos , Galle , Beaulieu, Chambard, Falco, Cueto and Chinesta.
This is an open-access article distributed under the terms of the Creative Commons Attribution License (CC BY). The use, distribution or reproduction in other forums is permitted, provided the original author(s) and the copyright owner(s) are credited and that the original publication in this journal is cited, in accordance with accepted academic practice. No use, distribution or reproduction is permitted which does not comply with these terms.
FIGURE 10.
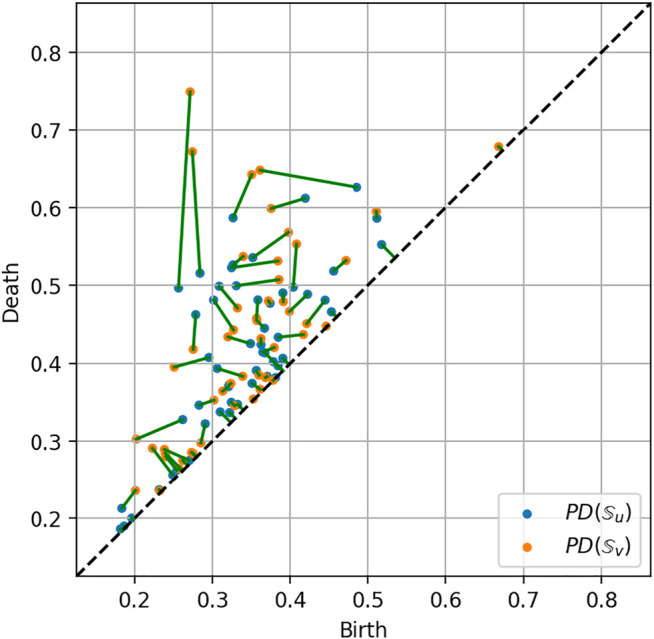
Optimal matching between two persistence diagrams related to two robot trajectories.