
Fig. 1:
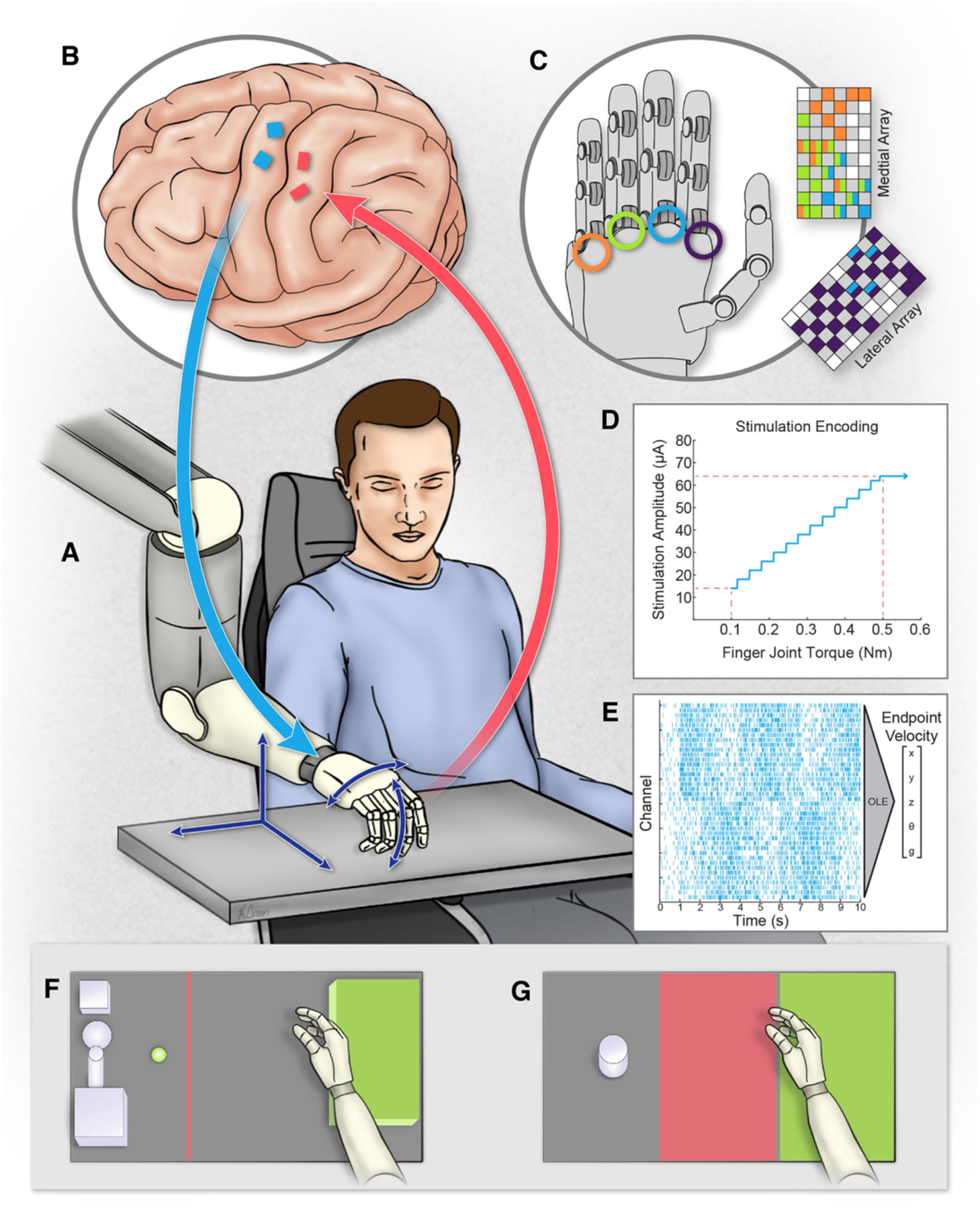
Overview of the bidirectional BCI system. (A) The participant used the intracortical BCI to control a robotic prosthesis in real time, controlling all five dimensions (dark blue arrows) continuously from the start to the end of the trial. (B) Four microelectrode arrays were implanted in the left hemisphere. Arrays in motor cortex (blue) recorded neural activity to control the prosthesis. Arrays in somatosensory cortex (red) delivered stimulation pulses, evoking sensory percepts referred to the hand. (C) Torque measurements from the robotic hand controlled stimulation of individual electrodes. Colored grids (adapted from Flesher et al. 2016) represent electrodes and locations on the hand where stimulation evoked a percept. Index finger torque was used to drive stimulation of the index finger sensation and middle finger torque was used to drive stimulation of electrodes associated with the middle, ring, and pinky finger. (D) Stimulation current amplitude was modulated by torque using a linear transformation. (E) Example raster plot of neural data recorded from motor cortex and decoded into endpoint velocities using an optimal linear estimator. (F) Overhead view of the Action Research Arm Test (ARAT). Different objects (not all shown) were positioned at the presentation location (green dot), grasped, and then placed on the platform (green box) as quickly as possible. (G) Overhead view of the object transfer task showing the object (gray), transit (red) and target (green) zones. (Image Credit: Kenzie Green)