
Fig. 1.
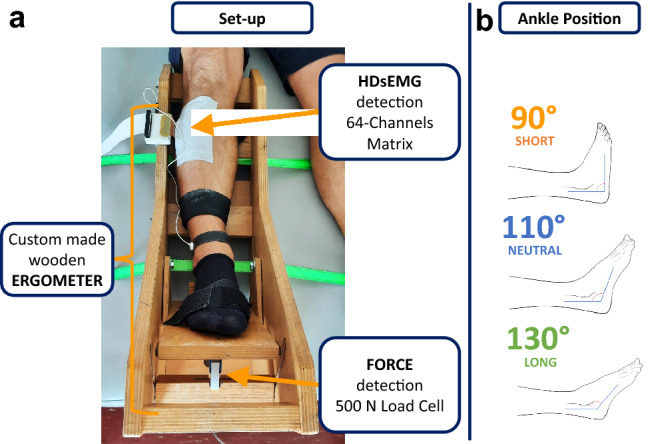
Schematic representation of the experimental setup (a). The right leg of the subject was fastened to the custom-made wooden ergometer. The foot was ensured to the support with Velcro straps. The HDsEMG was recorded with one matrix applied to the proximal part of the TA muscle belly. The torque was detected with a 500 N load cell. This particular ergometer allowed to set the ankle angle in different positions to achieve three muscle–tendon lengths: short, optimal, and long, as reported on the right (b)