
Fig. 1.
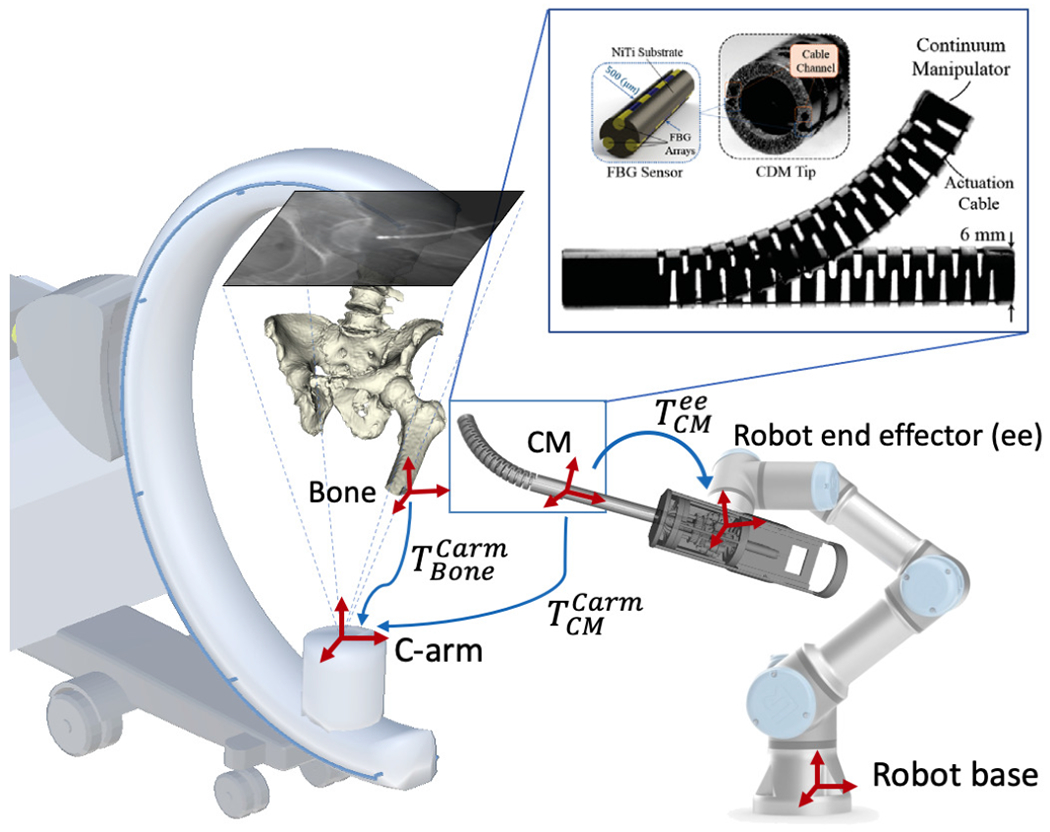
Concept of the proposed fluoroscopic image-based navigation for the CM. Key frames are illustrated as red cross arrows. The blue arrows illustrate the transformations. and are rigid pose estimations of the CM and the bone anatomy in the C-arm coordinate frame. is the hand-eye matrix. Top right: Continuum manipulator and the integrated FBG with triangulation configuration [1].