
Figure 2.
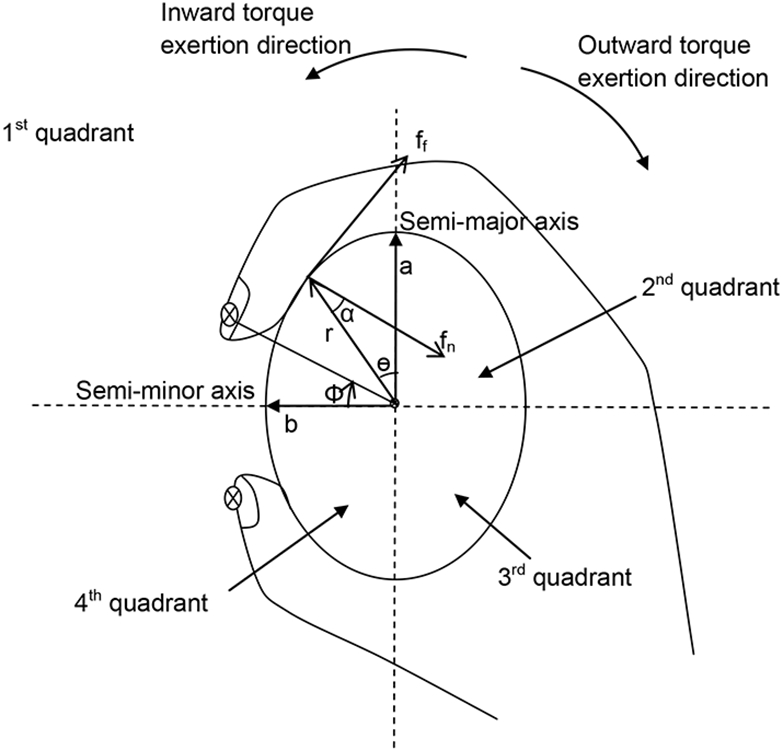
An elliptic cylinder handle grasped by the hand viewed from the top of the handle. Both normal force (fn) and friction force (ff which can be up to μ fn, where μ is the coefficient of friction between the hand and handle) contribute to torque generation, via moment arms (rcosα for friction force, ff, rsinα for normal force, fn). The elliptic cross-section area with a semi-major axis length of a and semi-minor axis length of b can be divided into four quadrants to examine force distribution along the handle circumference. Fingertips’ angular locations from the semi-minor axis (ϕ) were found for the thumb tip and the middle fingertip separately. The finger shown on the top represents the middle finger.