
Figure 7:
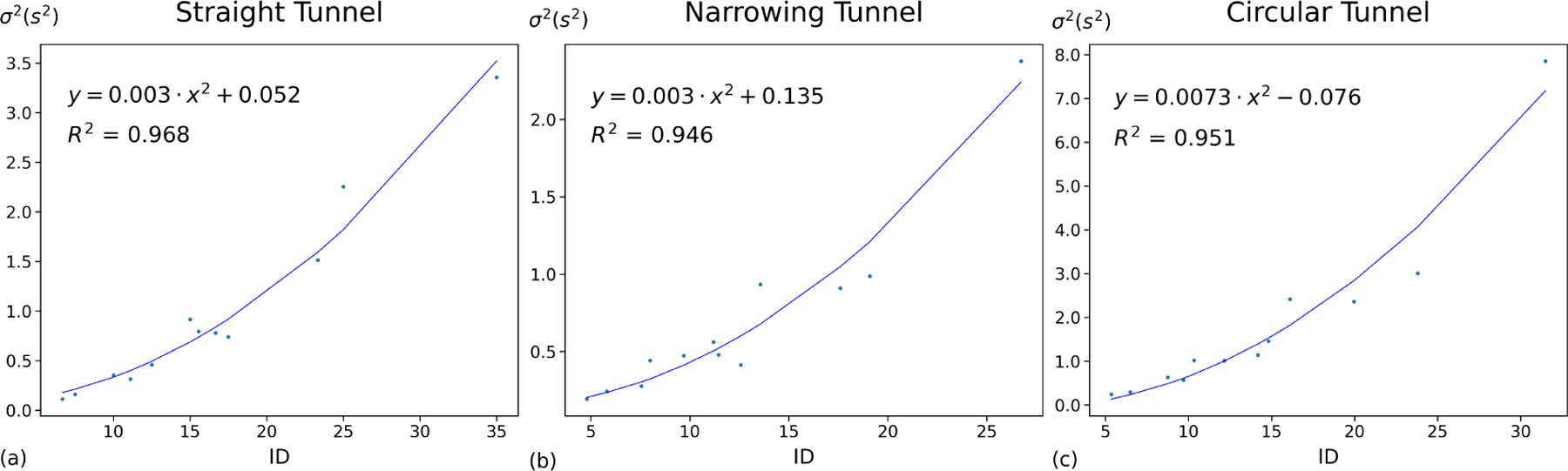
Steering law variance prediction against observed variance of MT using quadratic variance model (Model #4 in Table 1) in each of straight, narrowing and circular tunnel tasks.
Official websites use .gov
A
.gov website belongs to an official
government organization in the United States.
Secure .gov websites use HTTPS
A lock (
) or https:// means you've safely
connected to the .gov website. Share sensitive
information only on official, secure websites.
Steering law variance prediction against observed variance of MT using quadratic variance model (Model #4 in Table 1) in each of straight, narrowing and circular tunnel tasks.