
Figure 8.
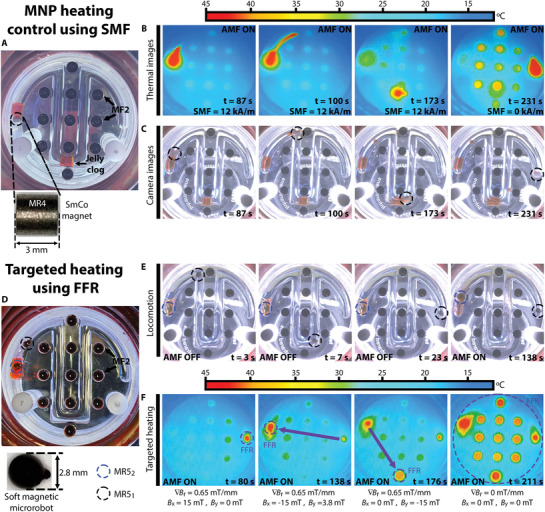
Locomotion and heating control. Experimental set A), timelapse USB camera B), and thermal camera C) image captures for the locomotion of a hard‐magnetic millirobot, the eddy current heating of electric conductive materials and suppression of the heating properties of soft‐magnetic materials using SMF. Experimental set D), timelapse USB camera E), and thermal camera F) images captures for the locomotion and targeted heat of soft‐magnetic millirobots using an FFR.