
Figure 1.
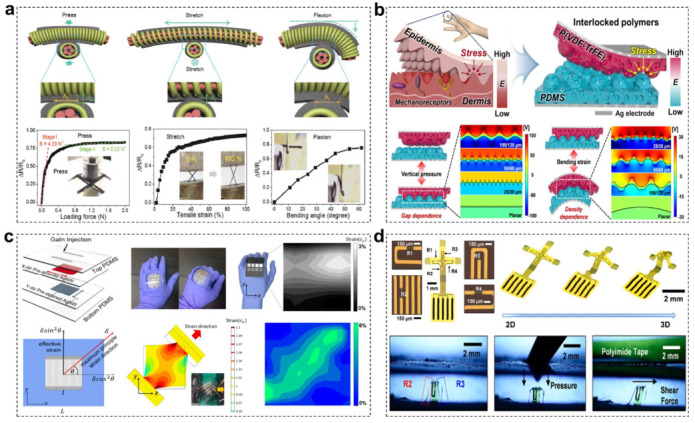
(a) Schematic illustration and relative resistance variation of electronic fabric artificial skin in response to pressure, stretching and flexion force. Reprinted with permission [48]. Copyright 2016, Wiley-VCH. (b) The epidermis-dermis layer with interlocked micro-ridges in human skin and the skin-inspired nanostructured e-skin. Schematic illustration and theoretical calculation of the gap distance change of the resultant electronic sensors under vertical pressure and bending strain. Reproduced with permission from ref. [50]. Copyright 2018 American Chemical Society. (c) Schematics of the multidimensional strain sensor with X-directional and Y-directional pre-strained AgNW. Demonstration of applications of multidimensional strain sensors to map the strain distribution for hand grip motion. Reprinted with permission from ref. [58] (Copyright 2015 American Chemical Society) (d) Optical images of 2D precursor that have two piezoresistors (R2 and R3) in the vertical direction and the other two (R1 and R4) in the horizontal direction, and their 3D structure evolutions during the mechanical buckling processes. The bottom images are the microscopic pictures of the as-fabricated sensor in response to normal force and shear force. Reprinted with permission [60]. Copyright 2019, American Chemical Society.