
Figure 6.
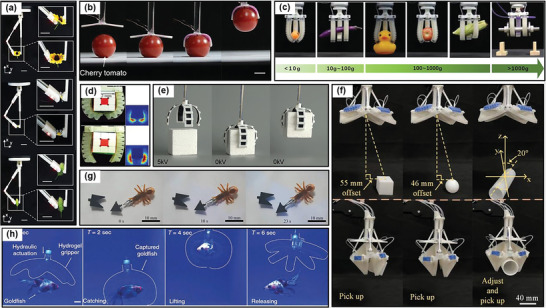
Demonstrations of soft grippers consisting of different materials: a) a SMA gripper to pick up two daisy‐like flowers with different sizesand a panicle of green bristlegrass. Reproduced with permission.[ 352 ] Copyright 2021, Elsevier. b) a LCE gripper to grip and lift a cherry tomato. Reproduced with permission.[ 353 ] Copyright 2021, American Chemical Society. c) an SMP gripper capable of grasping and lifting a wide range of object weights from 10 to 1500 g. Reproduced with permission.[ 243 ] Copyright 2019, Wiley‐VCH. d) a soft gripper collecting Rubik’s cube by a pressurized air input. Reproduced with permission.[ 354 ] Copyright 2020, IOP Publishing. e) a DE gripper approaches the cube and then grips it by turning off the voltage. Reproduced with permission.[ 355 ] Copyright 2019, Elsevier. f) a soft pneumatic gripper to grasp a cube, sphere and cylinder. Reproduced with permission.[ 357 ] Copyright 2021, IOP Publishing. g) IPMC gripper robots splice components cooperatively. Reproduced with permission.[ 356 ] Copyright 2019, IOP Publishing. h) a transparent hydrogel gripper to catch, raise and release a live goldfish. Reproduced with permission.[ 128 ] Copyright 2017, Springer Nature.