
Figure 3.
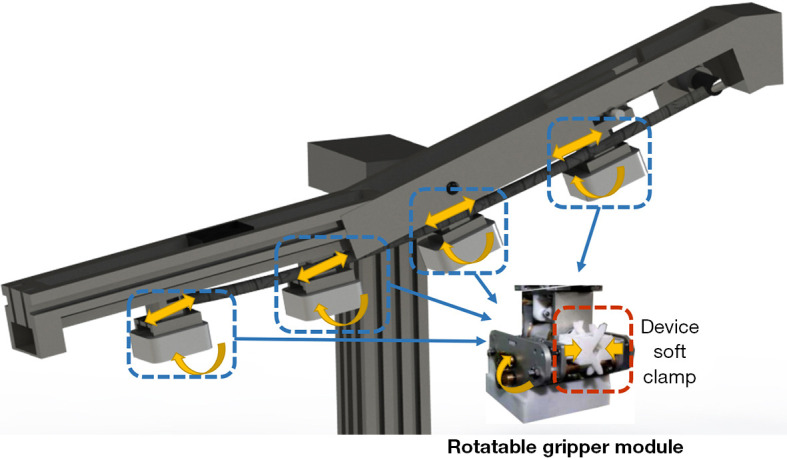
Universal endovascular robot designed by Wang et al. Four independent grippers (in the red-dotted frame in the picture) are installed on a linear platform. Each gripper can move linearly along the platform and rotate within a certain range. Many complex surgical operations can be performed through the combined movement of different grippers. The device clamp of each gripper (in the blue-dotted frames in the picture) is made of a soft material, which can hold interventional instruments of any shape.