
Figure 2:
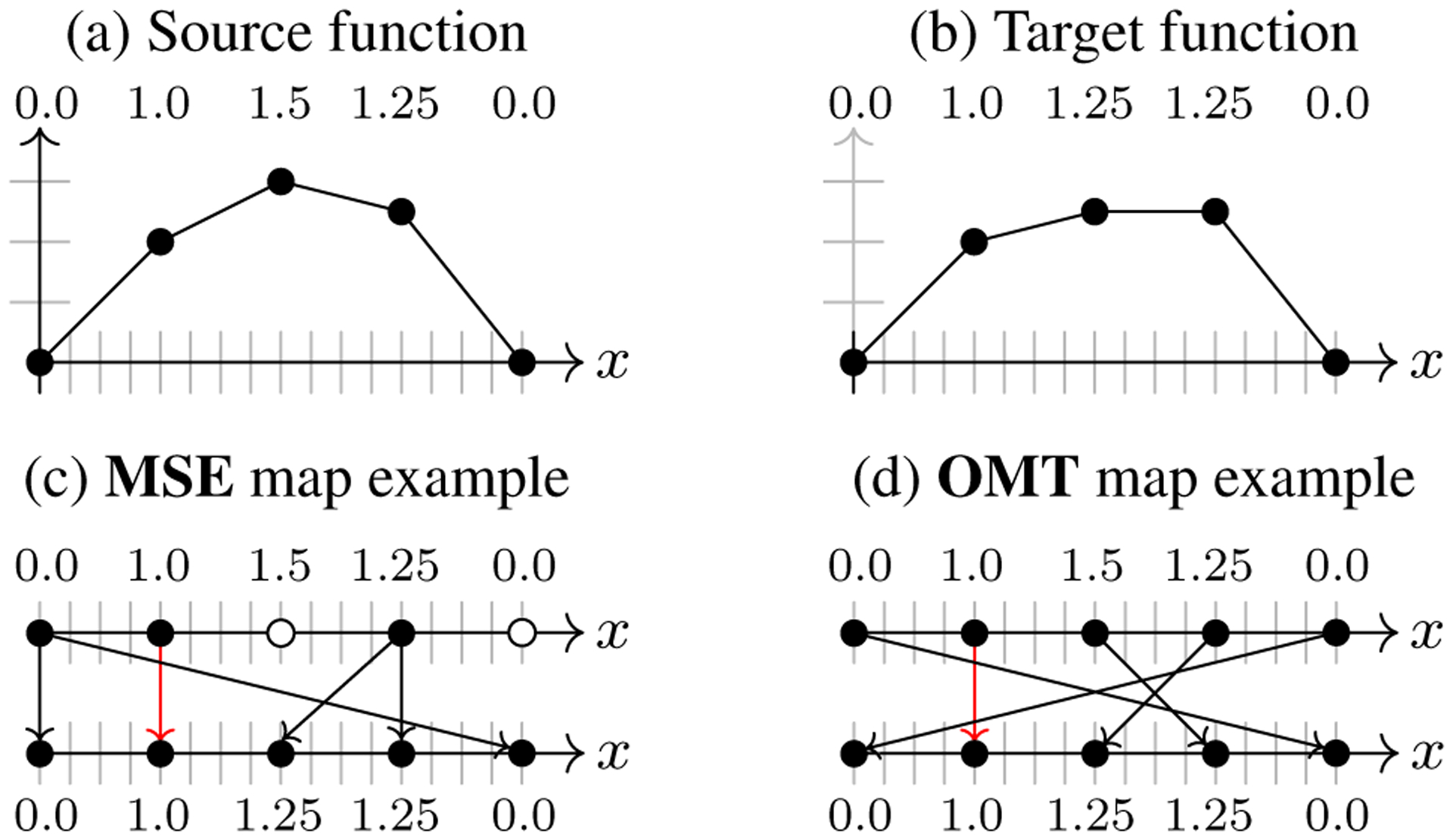
Source and target functions for a 1D registration example. Panels (c) and (d) show two possible solutions for mean square error (MSE) and OMT, respectively. In both cases, solutions may not be unique. However, for OMT, matching solutions will be one-to-one, i.e., invertible. OMT imposes a stronger constraint than MSE on the obtainable maps, but irregular maps are still permissible.