
Figure 4. Comparison of optimization results with and without feedforward control, for a neural time delay of 10 ms.
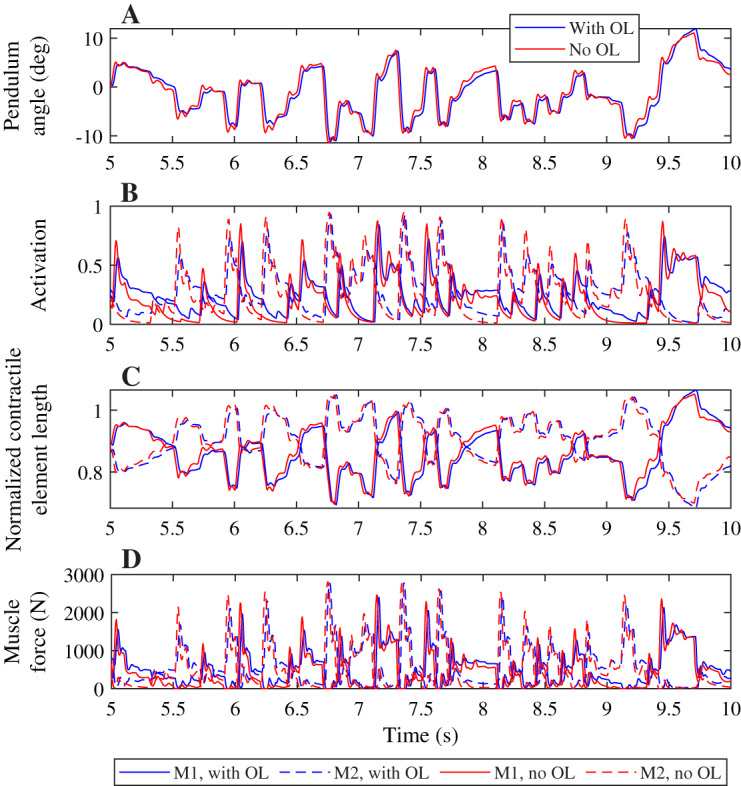
Pendulum angle (A), activation (B), contractile element length (C), and muscle force (D) for the solution with feedforward control (blue) and without (red) are plotted for 5 s of the 20 s simulations. A solid line is used for muscle 1 (M1) and a dashed line for muscle 2 (M2) in (B)–(D).