
Figure 2.
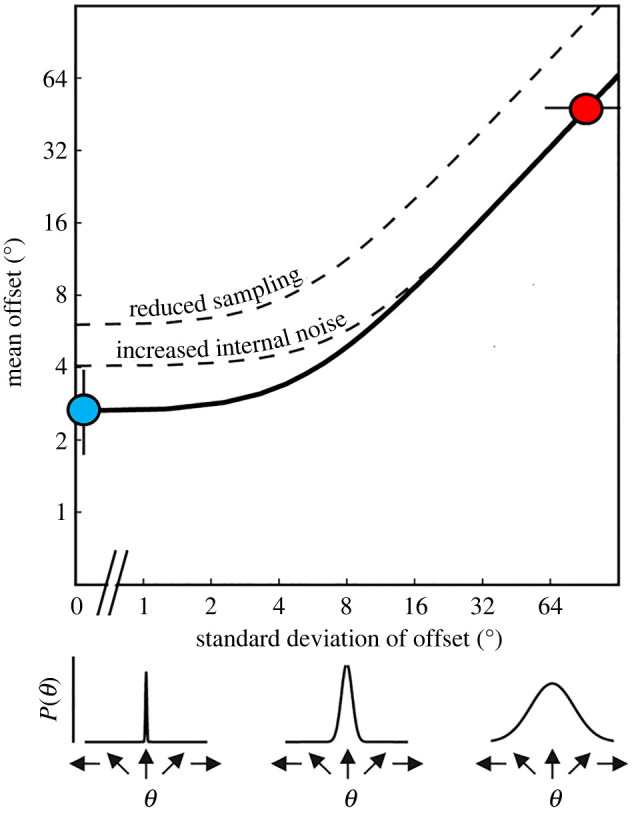
Equivalent noise function. Diagram of example equivalent noise function constrained by data from no-noise (blue) and high-noise (red) conditions of the averaging tasks. The mean direction/orientation offset (left or right of vertical) that is required to discriminate at a certain level of accuracy (i.e. threshold) increases as a function of the standard deviation of the distribution of directions/orientations from which the elements are drawn (external noise). Thresholds are relatively unaffected by low levels of external noise, as internal noise dominates. However, as external noise is increased further, the internal noise is swamped and thresholds start to increase. In the no-noise condition (blue), the standard deviation is fixed at 0° and the no-noise threshold is obtained by varying the directional/orientation offset. In the high-noise condition (red), the mean offset is fixed at ±45° in the motion task (as depicted here), and ±22.5° in the orientation task, and the standard deviation is varied to find the maximum tolerable noise. Reduced sampling shifts the function upwards, with reduced discrimination performance at all levels of internal noise. By contrast, increased levels of internal noise lead to higher thresholds at low levels of external noise and a rightwards shift of the elbow of the function, so that more external noise is required before thresholds start to increase.